



















ROS与Arduino-SRF08 Ultrasonic Ranger(SRF08超声波测距仪)
SRF08 Ultrasonic Ranger(SRF08超声波测距仪)
说明
- 这个教程展示通过Arduino和SRF08超声波测距仪进行测距。SRF08通过SPI/I2C与Arduino进行通讯。
硬件
- Arduino UNO或其他
- SRF08 Ultrasonic Ranger (SRF08 Arduino library 下载)
连接图
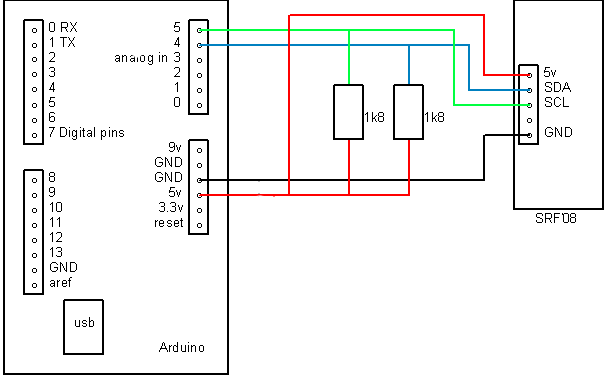
- 额外需增加两个1.8k欧的上拉电阻
代码
/*
* rosserial SRF08 Ultrasonic Ranger Example
*
* This example is calibrated for the SRF08 Ultrasonic Ranger.
*/
#include <Sonar_srf08.h> //SRF08 specific library
#include <WProgram.h>
#include <Wire.h>
#include <ros.h>
#include <std_msgs/Float32.h>
//Set up the ros node and publisher
std_msgs::Float32 sonar_msg;
ros::Publisher pub_sonar("sonar", &sonar_msg);
ros::NodeHandle nh;
Sonar_srf08 MySonar; //create MySonar object
#define CommandRegister 0x00
int New_Address = 248; //0xF8
#define ResultRegister 0x02
float sensorReading =0;
char unit = 'i'; // 'i' for inches , 'c' for centimeters
void setup()
{
MySonar.connect();
MySonar.changeAddress(CommandRegister, New_Address);
New_Address += 4;
nh.initNode();
nh.advertise(pub_sonar);
}
long publisher_timer;
void loop()
{
if (millis() > publisher_timer) {
// step 1: request reading from sensor
MySonar.setUnit(CommandRegister, New_Address, unit);
//pause
delay(70);
// set register for reading
MySonar.setRegister(New_Address, ResultRegister);
// read data from result register
sensorReading = MySonar.readData(New_Address, 2);
sonar_msg.data = sensorReading;
pub_sonar.publish(&sonar_msg);
publisher_timer = millis() + 4000; //publish once a second
}
nh.spinOnce();
}
- 使用Arduino Wire库处理I2C相应的读写操作。
测试
- 新窗口打开
$ roscore
- 新窗口打开,/dev/ttyUSB0为Arduino的设备端口号
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0
- 新窗口打开
rostopic echo sonar
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号