



















搭建ROS小车底盘-第五篇校准
搭建ROS小车底盘-第五篇校准
说明
- 介绍如果小车速度不稳定,通过校准PID来改进
问题:
- 如果发现小车速度互快互慢,或者走不了直线,那是因为PID参数给的不合理造成的。
- PID的目的是通过改变电机PWM值,使电机实际的转速基本等于期望的转速。
- 如果参数不合理,就会出现实际的转速和期望的转速相差很远。
- 也就是说,我们没办法精准控制小车。
校准方法:
- 把电机PWM值、期望的转速和实际的转速这三者的值用图表实时地描绘出来。
- 根据PWM值和实际的转速的运动轨迹,不停地修改PID的参数,让期望的转速和实际的转速能在很短时间内的达到一致。
- 调节顺序,先调P,再调I,最后调D,通常只需要P和I两个参数就可以了。
程序更改
- 电机PWM值、期望的转速和实际的转速图表实时展示的方法
- 修改文件~/catkin_ws/src/ros_arduino_bridge/ros_arduino_python/src/ros_arduino_python/arduino_driver.py
- 找到class Arduino,在下面添加如下代码:
def get_pidin(self):
values = self.execute_array('i')
if len(values) != 2:
print "get_pidin count was not 2"
raise SerialException
return None
else:
return values
def get_pidout(self):
values = self.execute_array('f')
if len(values) != 2:
print "get_pidout count was not 2"
raise SerialException
return None
else:
return values
修改文件~/catkin_ws/src/ros_arduino_bridge/ros_arduino_python/src/ros_arduino_python/base_controller.py中有四处需要修改。
在
from tf.broadcaster import TransformBroadcaster下面增加
from std_msgs.msg import Int32
- self.odomPub = rospy.Publisher(‘odom’, Odometry) 上面添加如下内容:
self.lEncoderPub = rospy.Publisher('Lencoder', Int32)
self.rEncoderPub = rospy.Publisher('Rencoder', Int32)
self.lPidoutPub = rospy.Publisher('Lpidout', Int32)
self.rPidoutPub = rospy.Publisher('Rpidout', Int32)
self.lVelPub = rospy.Publisher('Lvel', Int32)
self.rVelPub = rospy.Publisher('Rvel', Int32)
- 在poll(self)函数的,
if now > self.t_next:下添加
try:
left_pidin, right_pidin = self.arduino.get_pidin()
except:
rospy.logerr("getpidout exception count: ")
return
self.lEncoderPub.publish(left_pidin)
self.rEncoderPub.publish(right_pidin)
try:
left_pidout, right_pidout = self.arduino.get_pidout()
except:
rospy.logerr("getpidout exception count: ")
return
self.lPidoutPub.publish(left_pidout)
self.rPidoutPub.publish(right_pidout)
- 在poll(self)函数的,
if not self.stopped:下添加:
self.lVelPub.publish(self.v_left)
self.rVelPub.publish(self.v_right)
运行程序
- 在树莓派终端执行命令:
$roslaunch ros_arduino_python arduino.launch
- 在树莓派新终端执行命令:
$rqt_plot /Lencoder /Lpidout /Lvel
- 在树莓派新终端执行命令:
$rostopic pub -r 30 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.3, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0}}'
小车以0.3m/s固定线速度运行。图表中/Lvel/data代表左轮期望转速(以编码器的计数器数目表示),/Lencoder/data代表左轮实际的转速,/Lpidout/data 代表电机PWM值。右轮的三个值分别是/Rvel、/Rencoder和/Rpidout。
效果图:
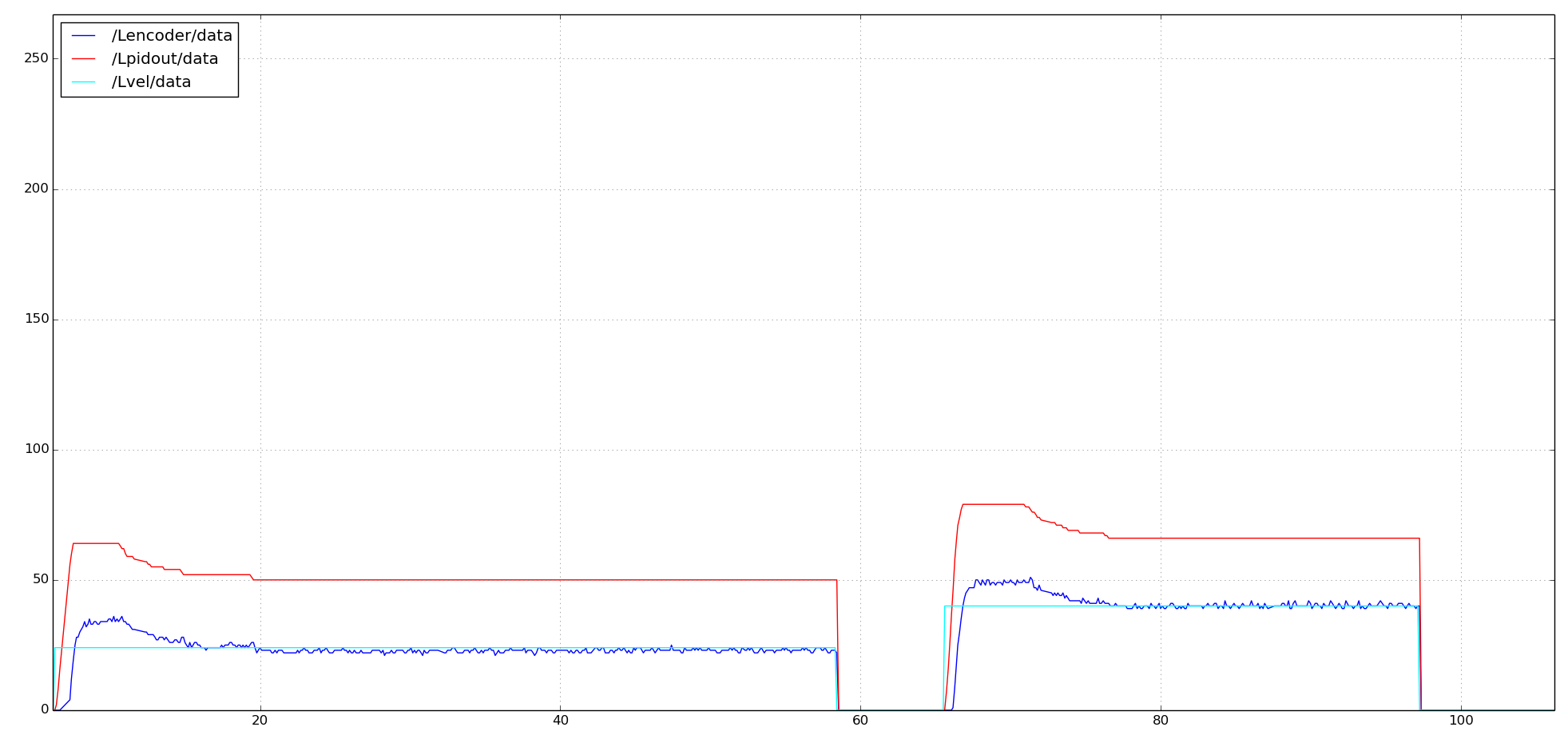
- 我们可以改变不同的速度,调整并检查PID效果。
PID调节口诀
- 口诀1:
参数整定寻最佳,从大到小顺次查。
先是比例后积分,最后再把微分加。
曲线振荡很频繁,比例度盘要放大。
曲线漂浮绕大弯,比例度盘往小扳。
曲线偏离回复慢,积分时间往下降。
曲线波动周期长,积分时间再加长。
理想曲线两个波,调节过程高质量。
- 口诀2:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号