



















Turtlebot3入门教程-仿真
Turtlebot3入门教程-仿真
说明:
- 介绍如何利用turtlebot3进行仿真
- 测试环境:Ubuntu 16.04 和 ROS Kinetic Kame.
结构图:

注意:
- TurtleBot3 Simulation 依赖 turtlebot3
步骤:
- 安装TurtleBot3 Simulation
cd ~/catkin_ws/src/
git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
cd ~/catkin_ws && catkin_make
- 启动仿真
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_fake turtlebot3_fake.launch
- TurtleBot3 仿真节点不依赖实体机器人,也可以在rviz里通过teleop节点进行控制。
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
Gazebo仿真
- 第一次使用gazebo需要比较长的时间加载模型,也可以加载模型,参考
- 第一次使用Turtlebot3的gazebo仿真,需要把Turtlebot3的模型文件,复制到gazebo的模型目录里
mkdir -p ~/.gazebo/models/
cp -r ~/catkin_ws/src/turtlebot3_simulations/turtlebot3_gazebo/worlds/turtlebot3 ~/.gazebo/models/
- 设置模型参数,指定使用那种机器人型号:burger 或者waffle
export TURTLEBOT3_MODEL=burger
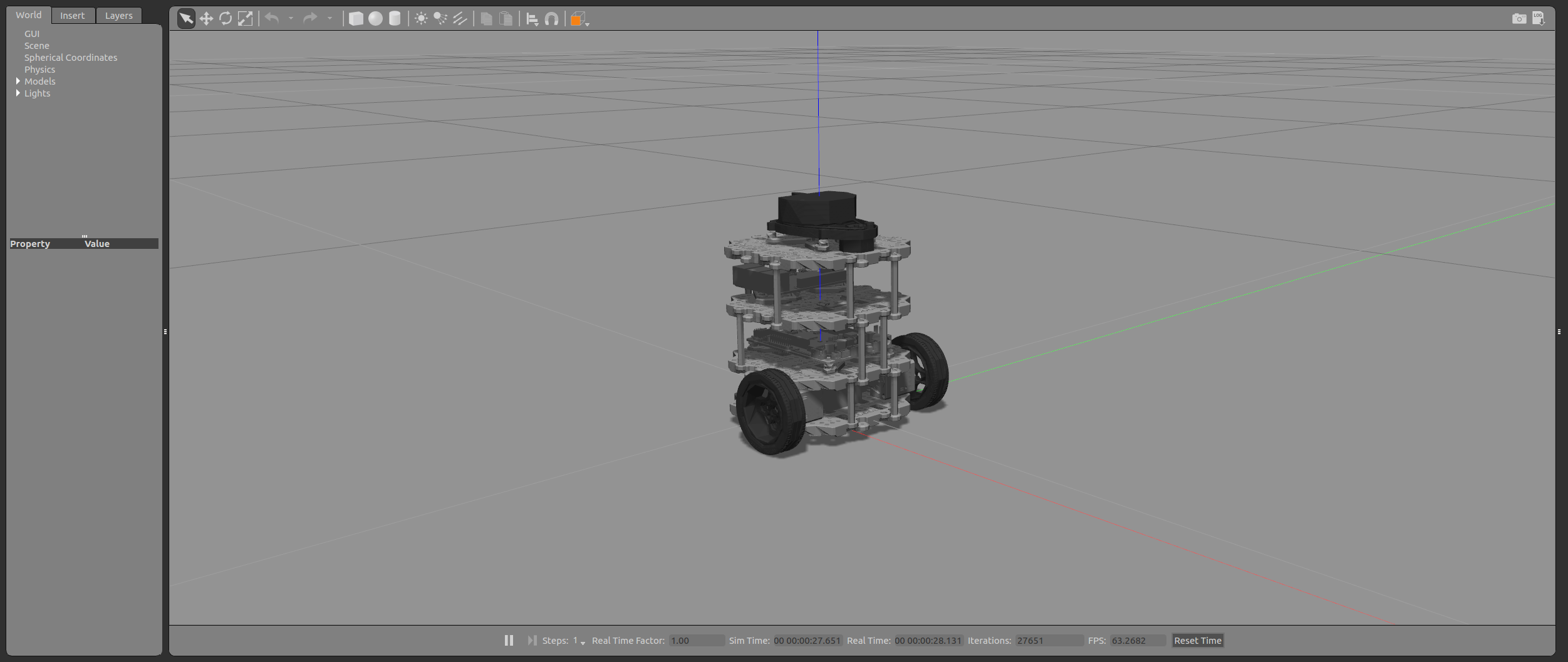
- 启动世界地图,默认的空白地图环境中加载Turtlebot3机器人
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch
- 效果:
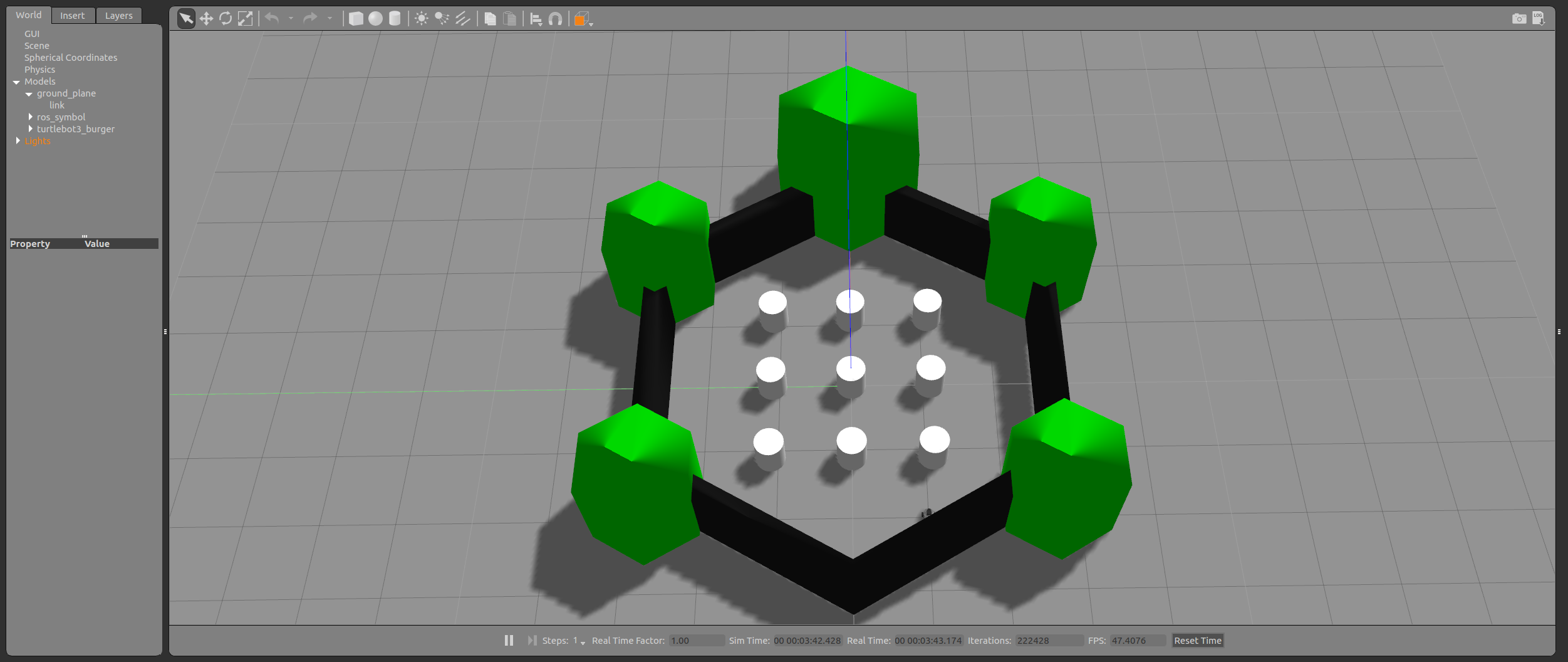
- 启动更复杂些的地图
roslaunch turtlebot3_gazebo turtlebot3_world.launch
- 效果:
- 用键盘控制turtlebot3
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
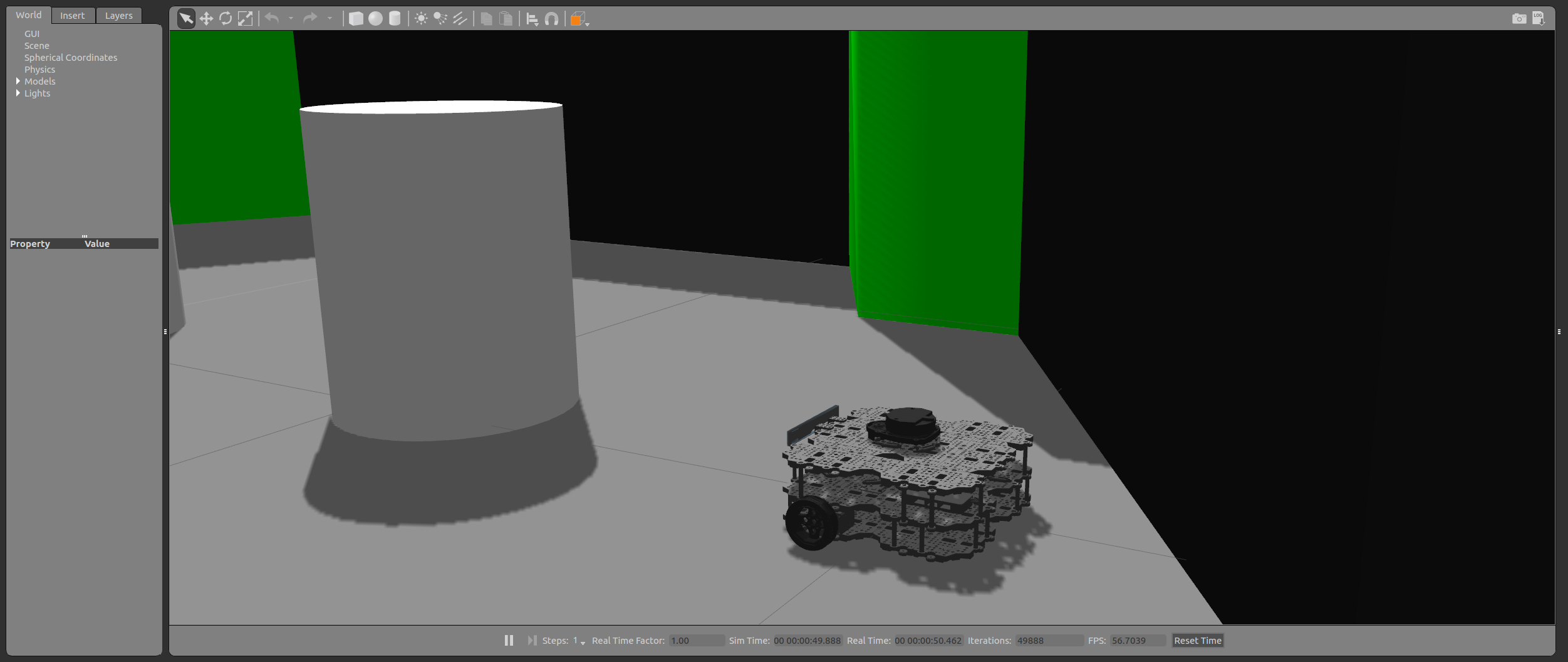
- 启动仿真
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_simulation.launch
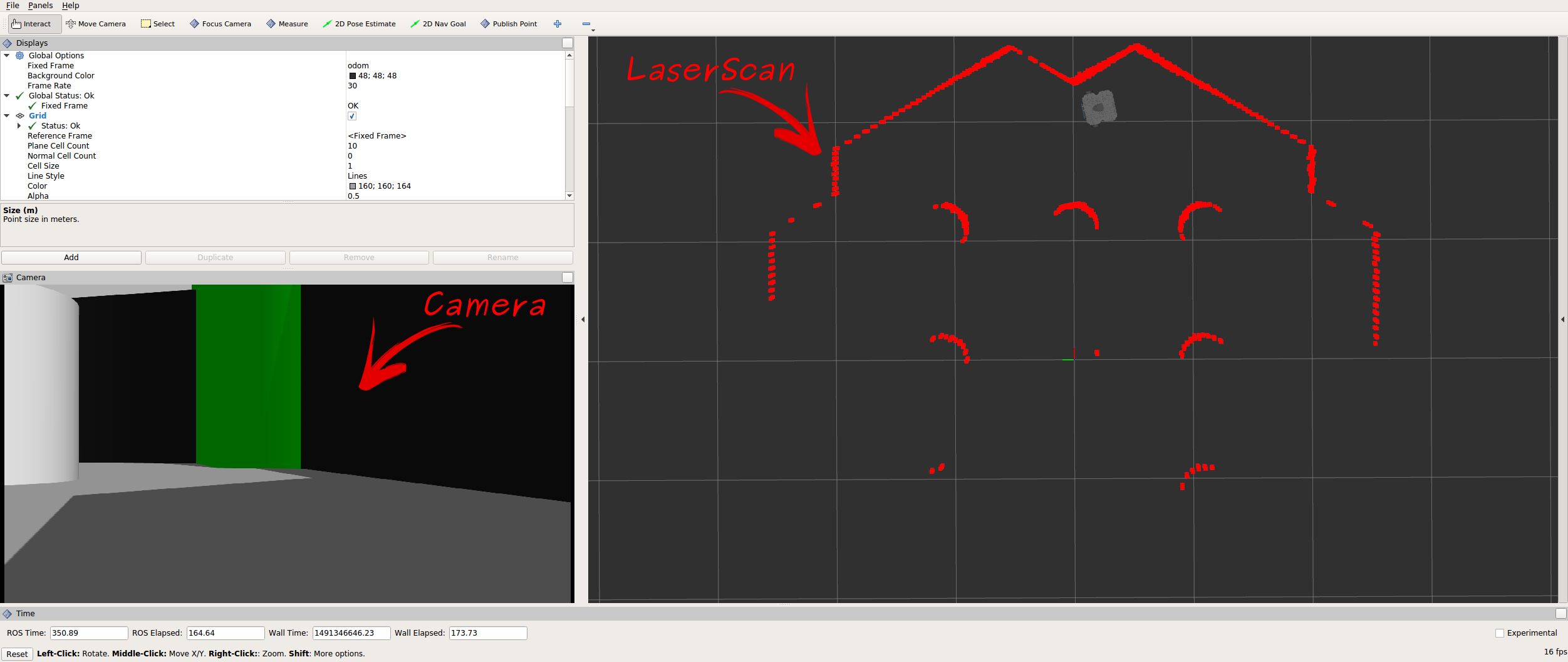
- 启动RVIZ可视化
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_gazebo_rviz.launch
- 效果:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号