



















ROS探索总结-29.功夫茶机器人项目总结
ROS探索总结-29.功夫茶机器人项目总结
说明:
- 介绍使用ROS做项目的经验之谈
介绍:
终于结束了18届高交会的功夫茶项目展示,总体来讲,展示效果不错,吸引了众多各年龄段的观众,还上了回CCTV的新闻。
在这里做一个阶段性的总结,也是自己这大半年来的所做所得。
今年4月中旬我来到深圳,和其他几个师兄创建了现在的公司——深圳星河智能科技有限公司,主打工业机器人。5月份完成了Ethercat主站部分的开发,6月份使用ROS建立了整套机器人的开发环境和可视化界面,7月份在实体机器人上实现了运动控制,8月份完成了机器人点动、连续运动的开发,9月份正式开始功夫茶机器人项目,并且完成了动作框架的开发,10月份集成了视觉识别并完成了整套动作的编排调试,11月份完成细节优化和错误处理,最终就是高交会上所展示的效果。

公司所有人都不是工业机器人方面出身,在最初阶段对工业机器人几乎没有概念,但是我们利用深圳的众多资源,迅速学习到了大量相关方面的概念,并且付之于行动,虽然水平还很初级,但至少搭建起了一整套系统。在此之中,最大的功臣莫过于ROS,帮助我们迅速完成了系统构建和应用开发。
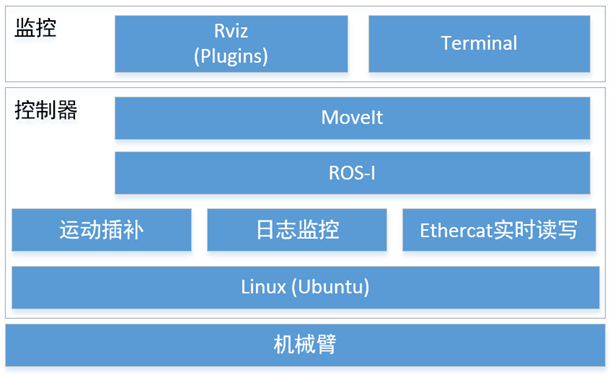
ROS中提供了众多关于机械臂方面的资源,其中最重要的莫过于MoveIt!轨迹规划在工业机器人中占据举足轻重的地位,但是对于我们这样初登大堂的开发者来说,还缺少众多专业知识,MoveIt中提供了许多轨迹规划方面的算法,可以让我们把注意力集中在系统的搭理上,而不必纠结算法实现。此外,rviz提供了可扩展的可视化界面,针对我们需要的功能开发一些插件,可以快速建立适合需求的控制监控界面。
当然ROS也不是万能的,它主要完成上层需要的功能,底层的控制器核心完全是自主开发,通过ROS-I中的simple message和上层模块通信,实现轨迹插补,日志上报,实时监控,参数配置,实时读写ethetcat总线等功能。

最后,来发表一些对ROS的看法。ROS虽然好用,但是目前的ROS1还只适合于研发,如果没有强大的研发能力,建议还是不要轻易应用于产品。我们在开发过程中,遇到过以下一些坑:
- roscore会突然挂掉,node会突然挂掉,rviz会突然挂掉,ROS的一切都会挂,系统就go die。。。
- moveit没办法实现连续运动,也没有点动等基本操作,需要去看moveit的底层代码然后重新组合去实现。
- ROS没有实时功能,需要自己搭建实时核,开发实时任务
- ROS资源占用率较大,对计算机的性能要求较高
目前的ROS1,在产品的研发初期,可以借助其完成快速原型开发,验证产品模型,然后在最终产品中,需要逐渐减弱对ROS的依赖,甚至彻底脱离(至少脱离ROS core),如果需要用到ROS功能包中的代码,也要对其有一定了解。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号