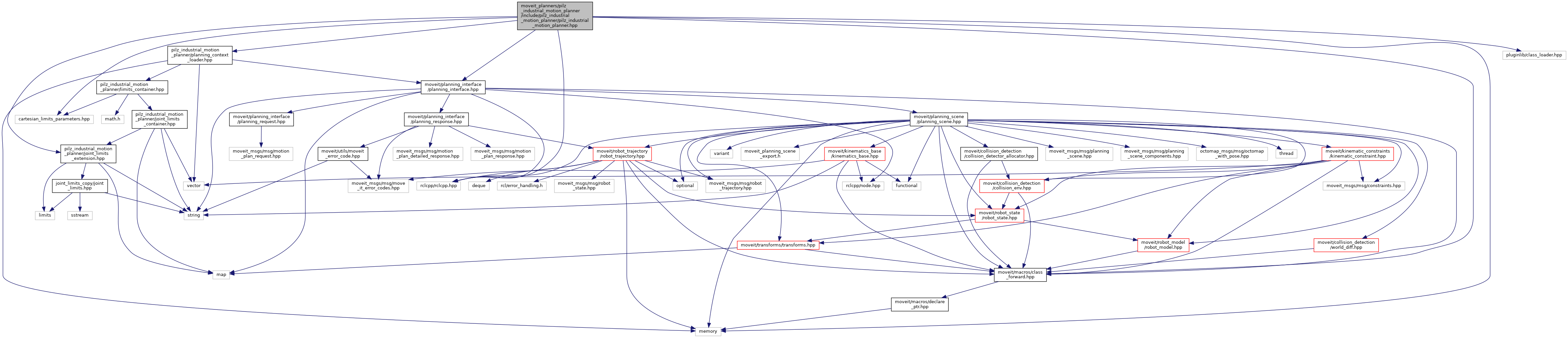
#include <rclcpp/rclcpp.hpp>#include <pilz_industrial_motion_planner/joint_limits_extension.hpp>#include <pilz_industrial_motion_planner/planning_context_loader.hpp>#include <moveit/macros/class_forward.hpp>#include <moveit/planning_interface/planning_interface.hpp>#include <pluginlib/class_loader.hpp>#include <memory>#include <cartesian_limits_parameters.hpp>
Include dependency graph for pilz_industrial_motion_planner.hpp:
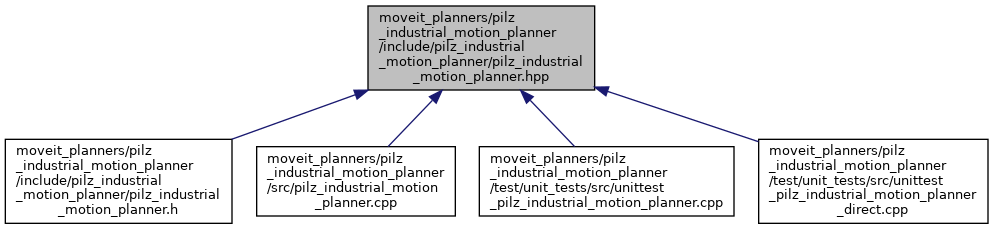
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pilz_industrial_motion_planner::CommandPlanner |
| MoveIt Plugin for Planning with Standard Robot Commands This planner is dedicated to return a instance of PlanningContext that corresponds to the requested motion command set as planner_id in the MotionPlanRequest). It can be easily extended with additional commands by creating a class inheriting from PlanningContextLoader. More... | |
Namespaces | |
| pilz_industrial_motion_planner | |
Functions | |
| pilz_industrial_motion_planner::MOVEIT_CLASS_FORWARD (CommandPlanner) | |