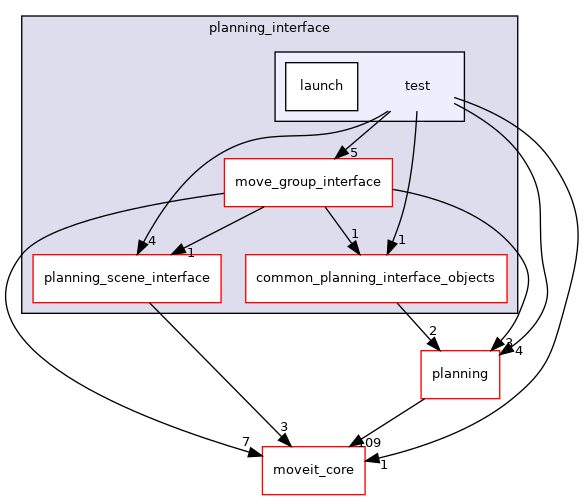
Directory dependency graph for test:
Directories | |
| directory | launch |
Files | |
| file | move_group_interface_cpp_test.cpp [code] |
| file | move_group_ompl_constraints_test.cpp [code] |
| file | move_group_pick_place_test.cpp [code] |
| file | moveit_cpp_test.cpp [code] |
| file | subframes_test.cpp [code] |
| file | test_cleanup.cpp [code] |