Testing Simulated Kinect
What is Kinect?
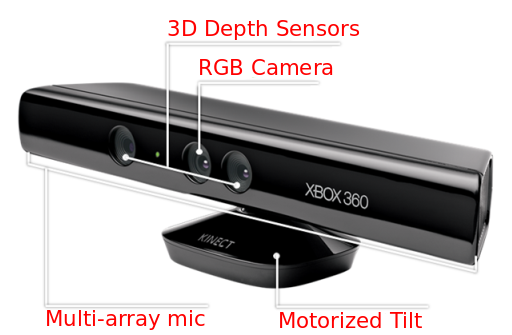
Kinect consists of three parts that work together: an RGB camera, a depth sensor, and a multi-array microphone. The TurtleBot uses Kinect to see the world in 3D and for detecting and tracking objects.
Prerequisites
First of all, make sure you have the openni packages installed:
sudo apt-get install ros-indigo-openni-*You can check the active 3D sensor of TurtleBot by running:
echo $TURTLEBOT_3D_SENSORYou have the right active 3D sensor if you see kinect. If you see asus_xtion_pro or something else you will need to set another value in .bashrc:
echo "export TURTLEBOT_3D_SENSOR=kinect" >> .bashrcor run this command in every new terminal:
TURTLEBOT_3D_SENSOR=kinectTesting Kinect
NOTE: This section is going to be completed later.