



















Turbot与python编程-实现带避障的定点导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Turbot与python编程-实现带避障的定点导航
说明:
- 介绍如何利用turbot机器人利用雷达或kinect进行定点导航,同时能动态避开障碍
代码:
- 实现代码:
# TurtleBot must have minimal.launch & amcl_demo.launch
# running prior to starting this script
# For simulation: launch gazebo world & amcl_demo prior to run this script
# goToSpecificPointOnMap.py
import rospy
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
import actionlib
from actionlib_msgs.msg import *
from geometry_msgs.msg import Pose, Point, Quaternion
form sys import argv
class GoToPose():
def __init__(self):
self.goal_sent = False
# What to do if shut down (e.g. Ctrl-C or failure)
rospy.on_shutdown(self.shutdown)
# Tell the action client that we want to spin a thread by default
self.move_base = actionlib.SimpleActionClient("move_base", MoveBaseAction)
rospy.loginfo("Wait for the action server to come up")
# Allow up to 5 seconds for the action server to come up
self.move_base.wait_for_server(rospy.Duration(5))
def goto(self, pos, quat):
# Send a goal
self.goal_sent = True
goal = MoveBaseGoal()
goal.target_pose.header.frame_id = 'map'
goal.target_pose.header.stamp = rospy.Time.now()
goal.target_pose.pose = Pose(Point(pos['x'], pos['y'], 0.000),
Quaternion(quat['r1'], quat['r2'], quat['r3'], quat['r4']))
# Start moving
self.move_base.send_goal(goal)
# Allow TurtleBot up to 60 seconds to complete task
success = self.move_base.wait_for_result(rospy.Duration(60))
state = self.move_base.get_state()
result = False
if success and state == GoalStatus.SUCCEEDED:
# We made it!
result = True
else:
self.move_base.cancel_goal()
self.goal_sent = False
return result
def shutdown(self):
if self.goal_sent:
self.move_base.cancel_goal()
rospy.loginfo("Stop")
rospy.sleep(1)
if __name__ == '__main__':
try:
rospy.init_node('nav_test', anonymous=False)
navigator = GoToPose()
# Customize the following values so they are appropriate for your location
px = float(argv[1])
py = float(argv[2])
position = {'x': px, 'y' : py}
quaternion = {'r1' : 0.000, 'r2' : 0.000, 'r3' : 0.000, 'r4' : 1.000}
rospy.loginfo("Go to (%s, %s) pose", position['x'], position['y'])
success = navigator.goto(position, quaternion)
if success:
rospy.loginfo("Hooray, reached the desired pose")
else:
rospy.loginfo("The base failed to reach the desired pose")
# Sleep to give the last log messages time to be sent
rospy.sleep(1)
except rospy.ROSInterruptException:
rospy.loginfo("Ctrl-C caught. Quitting")步骤:
- 主机,新终端,启动底盘
$ roslaunch turbot_bringup minimal.launch- 主机上,新终端,启动雷达amcl, 并指定地图
$ roslaunch turbot_slam laser_amcl_demo.launch map_file:=/path_to_map/xxx.yaml- path_to_map为你地图的目录
- xxx为你地图名称
- 从机,新终端,启动rviz
$ roslaunch turbot_rviz nav.launch- 获取地图数据方法
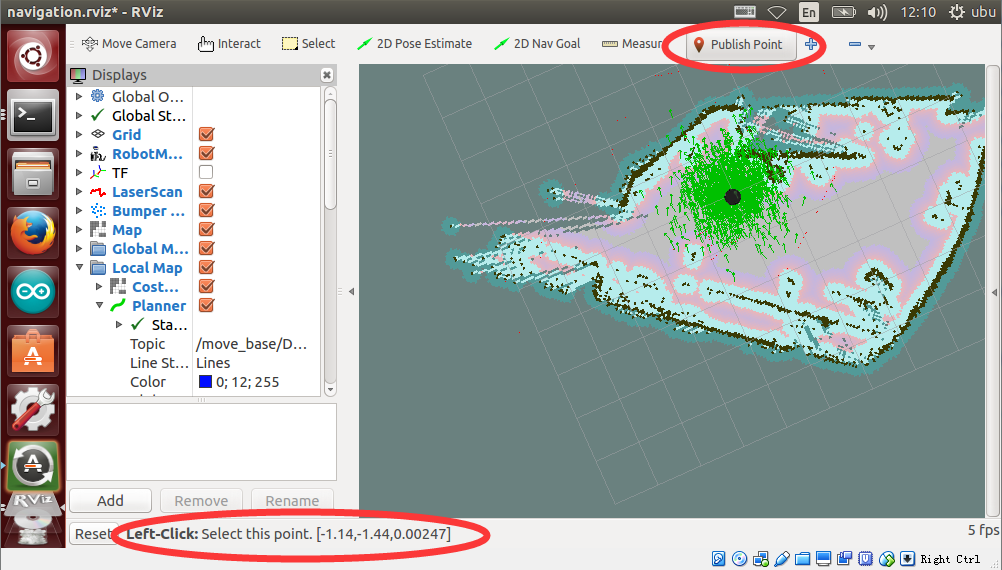
- 从rviz界面上,点击Publish point,鼠标移动到地图
- 查看rviz的做下动态状态条,会出现相应的坐标信息
- 记录合适的坐标信息
- 效果图:
- 指定格式为:
$ rosrun turbot_code goToSpecificPointOnMap.py x y- 实际如:
$ rosrun turbot_code goToSpecificPointOnMap.py -1.14 -1.44- 机器人会自动运行到指定的目标点, 并能动态避开障碍。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号