



















ArduSub入门教程-初始设置
ArduSub入门教程-初始设置
说明:
- 介绍首次设置自动驾驶仪包括下载和安装QGroundControl,将控制器安装到车辆,将其连接到系绳,电源和电机,然后执行初始配置和校准。
接线和连接
- 确切的接线配置取决于车辆配置和所使用的硬件。
- 以下是标准通道分配。请参阅标准推进器编号的框架配置。
| PWM通道 | 连接 |
|---|---|
| 频道1 | 推进器#1 |
| 频道2 | 推进器#2 |
| 频道3 | 推进器#3 |
| 频道4 | 推进器#4(如果使用) |
| 频道5 | 推进器#5(如果使用) |
| 频道6 | 推进器#6(如果使用) |
| 频道7 | 推进器#7(如果使用) |
| 频道8 | 推进器#8(如果使用) |
| 用户配置 | LED灯 |
| 用户配置 | 相机倾斜伺服 |
- 硬件还具有其他输入/输出端口,包括I2C和串行端口。
| 端口 | 连接 |
|---|---|
| I 2 C | 压力传感器(MS58XX) |
| Telem1串行端口 | 系绳(如果使用串行) |
| USB串行端口 | 伴随计算机(如果使用) |
| 电源端口 | 电源模块 |
安装QGroundControl
- 下载:最新的稳定版本的QGroundControl
- 安装:参考教程
设置树莓派
- 如果使用高级电子封装,Raspberry Pi计算机将用作Pixhawk的配套计算机。
- 计算机通过以太网连接处理视频流和中继与地面的通信。
- 有关如何设置Raspberry Pi以与ArduSub一起使用的信息,请参阅Raspberry Pi设置页面。
在Pixhawk上加载固件
- 编译的固件现在可用,可以从firmware.ardusub.com下载。
- 固件仅适用于以下硬件:Pixhawk(px-v2)
- 有关如何从源代码编译的说明,请参阅开发者部分。
通过树莓派加载
- 如果你使用Raspberry Pi配套的计算机和以太网系绳,通常最方便的是通过Raspberry Pi 将ArduSub固件刷到Pixhawk。
- 请注意,Raspberry Pi必须已经设置,然后您可以按照说明通过树莓派烧录。
通过QGroundControl加载
安装QGroundControl的最新日常版本,并导航到设置页面的固件选项卡
将Pixhawk插入计算机的USB端口。一旦检测到,QGroundControl将在右侧显示一个固件选择框。
选择“ArduPilot Flight Stack”,然后选中“高级设置”复选框。从出现的下拉框中,选择“自定义固件文件...”。
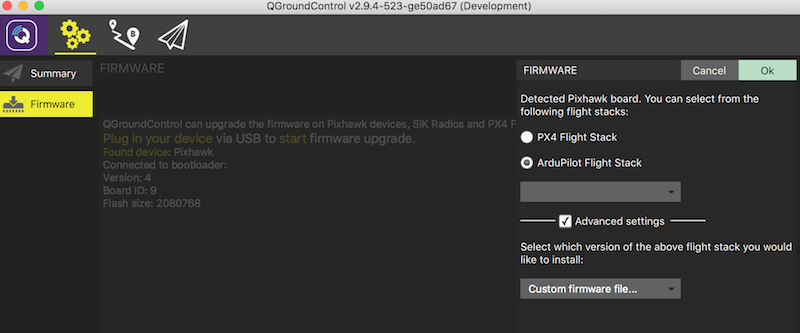
按右上角的“确定”,系统将提示您选择固件文件(可能命名为“ArduSub-v2.px4”)。
确保您下载最新的稳定固件并在此处选择。
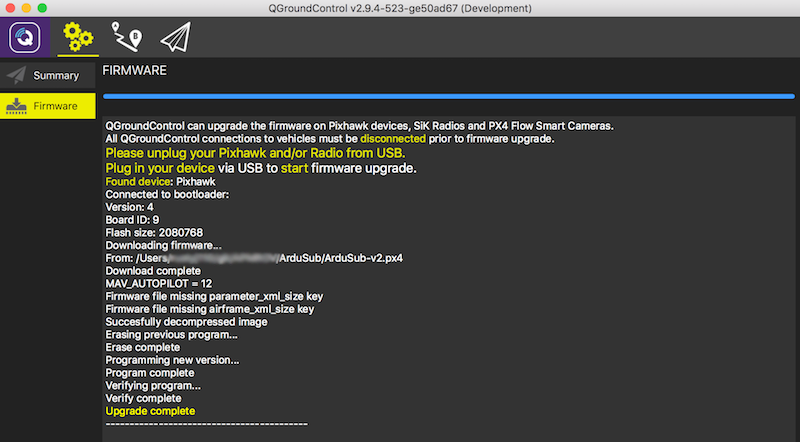
固件将上传Pixhawk,您将看到以下打印输出和成功消息。
主机计算机设置
(1)安装FTDI驱动程序(仅限串行/ Fathom-S Tether接口)
- Mac和Linux计算机通常已安装FTDI驱动程序。
- 对于Windows计算机,可能需要安装驱动程序。Sparkfun有一个很好的教程正确安装驱动程序。
- 安装后,Fathom-S Tether接口将在计算机上显示为串行端口。
(2)设置Internet共享(仅限以太网/ Fathom-X Tether接口)
- 在基于以太网的设置中,Raspberry Pi默认为IP地址192.168.2.2。
- 该主机必须设置为192.168.2.1的IP地址,以便接收通信和视频。
- 请参阅以下说明:
Windows
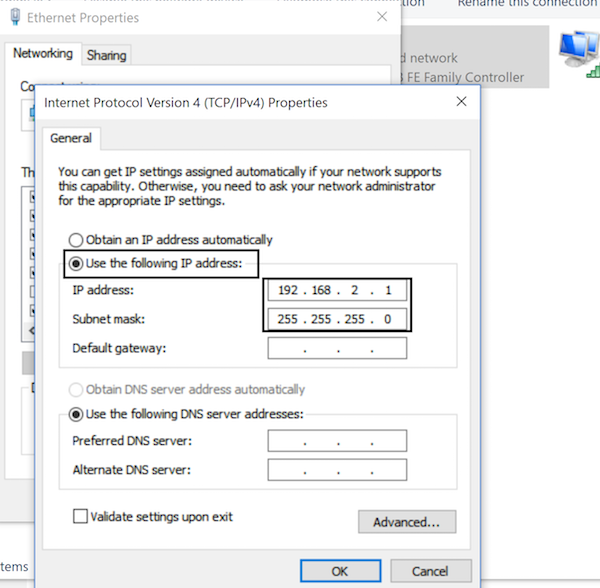
转到控制面板>网络和Internet>网络连接,然后右键单击以太网适配器,然后选择属性。
在属性对话框中,选择Internet协议版本4(TCP / IPv4),然后单击属性。
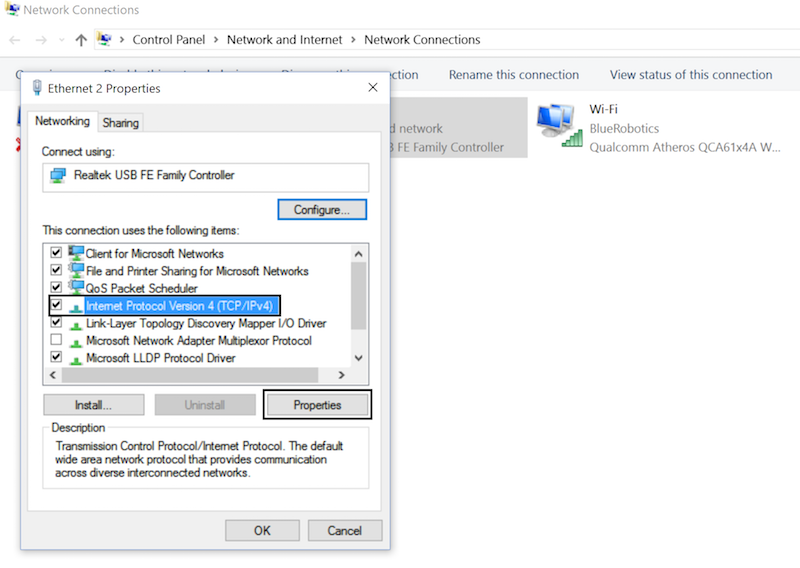
在下一个对话框中,输入192.168.2.1作为计算机的IP地址。输入255.255.255.0作为子网掩码。
Linux
- 待添加
Mac
- 从系统优先级,转到网络设置,并将以太网的IP设置为手动,地址为192.168.2.1,子网掩码为255.255.255.0。
- 从系统优先级,转到共享,然后单击“Internet共享”。为源和您的以太网端口或适配器为目标选择“Wi-Fi”。
将QGC连接到控制器
- 根据所使用的硬件,控制器可以通过几种不同的方法连接到QGC。
串口连接
- 如果使用串行端口,只需将端口连接到计算机并打开QGC。
- 控制器应自动连接到QGC,并且将下载板载数据。
与伴随计算机的以太网连接
- 如果使用以太网连接,然后一个伴随计算机必须使用的Pixhawk自动驾驶仪和表面计算机之间中继通信。
- 该Pixhawk通过USB接口连接到伴随电脑。
与Linux Autopilot(Navio,BBBmini等)的以太网连接
- 对于基于Linux的自动向导,当ArduSub代码启动时启动网络连接。例如,请参阅相应自动驾驶仪的文档
传感器校准
一旦控制器第一次连接到QGC,我们必须校准加速度计,罗盘和操纵杆。
校准步骤:
- 转到QGC的设置选项卡,选择红色传感器在左侧边栏选项卡。
- 选择自动驾驶仪方向:
- None 对于水平方向(如BlueROV1)
- Roll90 为BlueROV2
- 点击加速度计,并按照指示。
- 点击罗盘,并按照指示。
- 建成后,该传感器标签将不再是红色的。
要设置的重要参数
- 在Pixhawk将输出到推进器,灯光和舵机之前,有一些参数必须设置。
- 我们还将禁用故障堆栈。
- 这些将在未来被启用,但目前不适合ArduSub。
- 在设置页面上找到“参数”选项卡,并更改以下设置:
| 参数 | 要设置的值 |
|---|---|
| ARMING_CHECK | 禁用 |
| BRD_SAFETYENABLE | 禁用 |
- 你必须关机后再开机才生效。
操纵杆/游戏手柄校准
- 第一次在QGroundControl中使用新的操纵杆或游戏手柄时,将要求您进行校准。
- 这允许QGC检测哪个轴是哪个轴以及每个轴的范围。
- 重要ArduSub特异性说明:校准过程是一个有点混乱。
- 这将在即将到来的版本的QGC中修复,但现在,您必须遵循此过程。
- 单击操纵杆页面上的“校准”,然后单击“下一步”。
- 我们要校准游戏杆在QGC要求我们做相反的方式。当要求移动每个轴时,移动以下杆:
- 油门: right stick up/down
- 偏航: right stick right/left
- 滚动: left stick right/left
- 仰俯: left stick up/down
按钮设置
- ArduSub提供了一些参数来映射控制器按钮各种功能。此设置是必需的,因为没有配置默认值。
- 我们建议按钮分配如下图所示:

- 每个按钮可以分配一个主要功能和一个备用“移位”功能。如果使用“shift”功能,则必须分配“shift”按钮。这类似于键盘上的shift键,在按下时改变其他按钮的功能。
- 您可以分配按钮上的各种功能操纵杆设置选项卡。按下每个按钮将点亮按钮编号,然后可以选择所需的功能。请参阅下面的图片了解示例集(在Mac上)。请注意,按钮编号在控制器和操作系统之间是不同的,因此这不一定与您的设置相同。

- 注意,如果使用Logitech游戏手柄,按下“模式”按钮将使左操纵杆和按钮板切换位置。确保灯旁边的“模式” 不点亮。
- 另请注意,要在“X-input”模式下使用Xbox控制器或Logitech游戏手柄,必须安装X输入驱动程序。
- 我们建议360Controller。
设置电压和电流测量
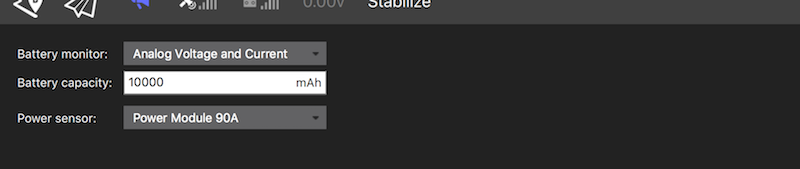
- 在电源选项卡中选择相应的设置。如果使用标准的3DR电源模块,选择模拟电压和电流,合适的电池容量和电源模块90A。
- 电池的容量取决于您所使用你的ROV,应在输入的电池毫安。
飞行模式设置
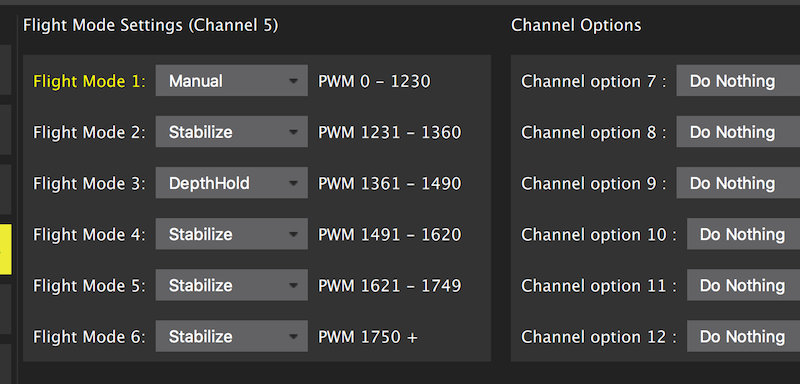
有几种飞行模式:手动,稳定和深度保持。
在飞行模式选项卡,设置第一个飞行模式(默认),以手动,并设置第二和第三,以稳定和深度保持。
剩余的飞行模式可以留在稳定或任何其他的设置。
记住,当您设置上面的操纵杆时,您添加了按钮来更改飞行模式。
可以通过按下其中一个按钮或从QGroundControl中的工具栏中选择所需的模式来输入这些飞行模式。
相机云台设置(如果使用)
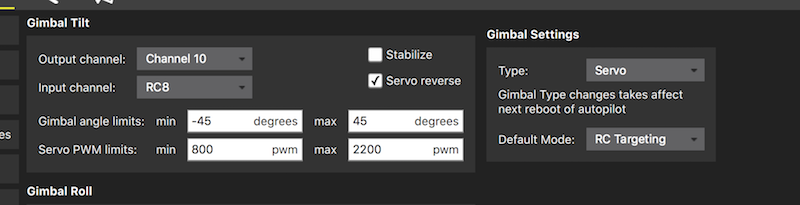
选择相机选项卡。“云台倾斜”设置用于相机倾斜。
选择哪个频道上的伺服被插入到“输出通道”和RC8为“输入通道”。
有效的输出通道是任何未使用的电机输出(RC1-RC8)和辅助输出1-4(RC9-RC12)。
选择伺服在右边的“类型”下的“万向设置”。
你也可以勾上Stabilize项,这将使基于车辆俯仰角相机的自动稳定。我们一般不予理会。
灯设置
灯光功能目前设置为支持使用标准伺服PWM信号进行控制的灯。
这是通过在连接完成RCIN9输入,它包含光控制信号,以适当的输出。
要做到这一点,请找参数RCx_FUNCTION,这里x是对应于灯的输出通道,并将其设置为RCIN9。
例如,如果灯被连接到输出通道7,然后设置RC7_FUNCTION到RCIN9如下所示。

请注意,此设置只适用于灯是可控用伺服PWM脉冲,如蓝色机器人流明灯。
配置电机方向
由于顺时针和逆时针螺旋桨以及接线,电机方向必须在初始设置期间进行测试和校正。
ArduSub包括一组用于此目的的参数。被称为参数MOT_1_DIRECTION为电机1-8和有效值是正常或反转。
请确保在完成此步骤之前完成所有上述步骤。我们通常按照这个过程检查电机旋转方向:
- 将飞行模式设置为“手动”
- 臂车
- 向前移动“向前”操纵杆,验证产生一些向前推力的推进器是否以正确的方向操作,并吹出车辆的后部
- 向上移动“垂直”操纵杆,验证产生垂直推力的推进器是否按正确的方向操作,向下吹空气
如果在编译期间选择了正确的框架配置,则不需要再执行任何验证。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号