



















ArduSub入门教程-故障排除
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ArduSub入门教程-故障排除
说明:
- 介绍用户遇到的问题以及解决方法。
车体控制
-
问题:车体翻转过来
-
问题:即使没有控制,车体转弯或移动。
-
解决:请检查RCx_TRIM参数,以确保所有微调设置为1500,但RC3_TRIM除外,应将其设置为1100。
-
问题:一旦车辆启动,电机就会旋转。
-
解决:
- 首先,检查以确保操纵杆油门设置为“完全下降为零油门”。
- 如果这不能解决它,检查车辆的校准水平正确,并且车辆处于水平。
- 飞行控制器尝试稳定车辆的姿态,使其完全水平。
- 如果车辆的姿态偏离水平,甚至一小部分的程度,飞行控制器将旋转电机以试图纠正错误。
- 如果车辆坐在陆地上,则错误不会改变,并且飞行控制器将更快和更快地旋转电机,因为它更努力地更难以纠正错误。
- 在陆地上测试车辆应该在MANUAL模式下进行,只是将引导输入传递到电机,没有稳定功能。
-
问题:无遥测(无Pixhawk连接)
-
解决:
- 检查Pixhawk是否通过USB插入配套计算机(Raspberry Pi)。
- 确保使用带数据线的USB电缆,某些USB电缆只提供电源,不允许通信。
- 您可以使用USB电缆直接将Pixhawk连接到水面计算机,以验证USB电缆是否正常工作。
- 检查您的网络设置。水面计算机应具有192.168.2.1的静态IP地址。
- 您可能需要调整防火墙设置以允许QGrouncControl访问网络。
- 您应该能够从陆上的计算机ping协同计算机。在陆上的计算机的命令行上输入:
ping 192.168.2.2- 问题:没有视频
- 解决:
-
如果您没有遥测,请按照上述说明进行故障排除。
-
如果您有遥测,但没有视频,请确保QGroundControl中的视频设置正确。
-
视频设置位于应用程序设置(Q图标)视图的常规选项卡中。
-
视频源应设置为UDP视频,端口应为5600.这些是默认设置。

-
如果视频设置正确,并且没有视频流,则最可能的原因是与摄像机带状电缆的物理连接出现故障。
-
断开ROV/Raspberry Pi的电源,并重新安装两端的带状电缆,确保电缆的触点侧正确定向。
-
触点应朝向相机模块上的电路板,并朝向Raspberry Pi上的HDMI连接器。
-
如果您已检查所有上述内容,但仍然没有视频流,则可以检查视频流过程是否有错误。
-
通过SSH或PuTTY登录Raspberry Pi,并在Raspberry Pi命令行中输入以下命令:
-
sudo screen -r video- 如果摄像头正在工作并且视频流正在运行,则输出应以如下方式结束:
Pipeline is PREROLLED ...
Setting pipeline to PLAYING ...
New clock: GstSystemClock- 要返回命令行并保持流运行,点击control + a然后键入'd'(分离)。
- 如果视频流没有运行,screen命令的输出将是:
There is no screen to be resumed matching video.- 您可以通过输入以下内容重新启动视频流式传输过程:
~/companion/RPI2/Raspbian/start_video.sh- 如果此命令的输出包含如下所示:
mmal: Failed to create camera component- 然后相机不工作。
- 仔细检查相机带状电缆,然后尝试运行
sudo rpi-update-
问题:相机不倾斜
-
解决:
- Pixhawk上的输出伺服轨需要单独的5V电源。
- Pixhawk上的电源模块和USB电源输入不会为伺服导轨供电。
- 确保您通过ESC BEC或独立的BEC在伺服导轨上有一个5V输入。
- 检查输入/输出通道是否配置为相机倾斜。
- 检查操纵杆按钮是否已分配给相机倾斜功能。
-
问题:“没有io线程心跳”消息不断出现
-
解决:
- 此消息表明APM io线程已停止运行。
- 最可能的原因是micro SD卡上的文件系统损坏。
- 从pixhawk中删除卡,并格式化为FAT32。
- 如果错误仍然存在,您将需要更换SD卡,或通过将LOG_BACKEND_TYPE参数设置为无(0)来禁用数据闪存日志文件。
记录
- 有两种类型的日志可用于在运行ArduSub时诊断问题,或检索数据以进行后处理。
(1)遥测日志
-
遥测日志存储接收的MAVLink消息。
-
MAVProxy和QGroundControl将遥测日志本地保存在.tlog文件中。
-
遥测日志是诊断大多数问题的首选方法。
-
一旦连接到自动驾驶仪,MAVProxy将保存所有遥测到一个名为'mav.tlog'的文件。
-
mav.tlog文件保存在运行MAVProxy的相同路径下。
-
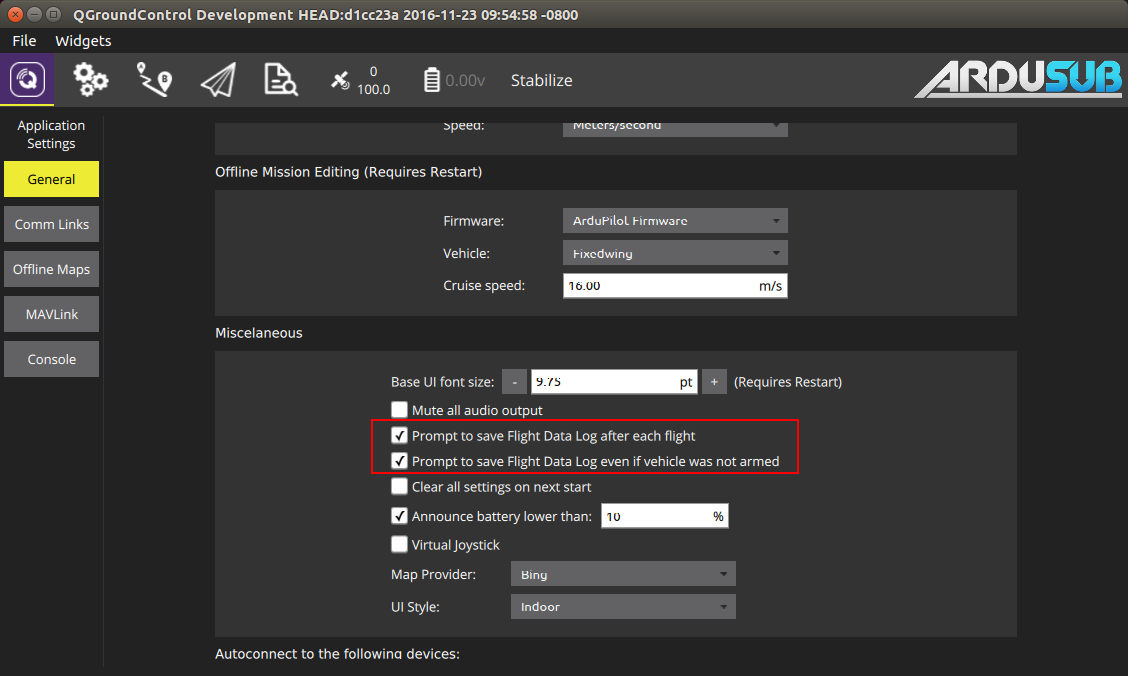
默认情况下,QGroundControl仅在车辆布防后才开始记录遥测。
-
QGroundControl可以配置为在自动驾驶仪撤防时记录遥测,方法是单击菜单栏中的“Q”图标,然后选择“常规”选项卡。
-
选择保存日志的选项,即使车辆没有布防,以便在撤防时记录遥测。
-
为了保存来自QGroundControl的遥测日志,您必须在断开与车辆的连接或退出应用程序后提示时单击保存。
(2)DataFlash日志
-
DataFlash日志由自动驾驶仪直接保存到板载存储器(在Pixhawk的情况下为SD卡),无论遥测连接如何。
-
这些日志保存在.bin文件中。DataFlash日志能够以比遥测日志快得多的速率记录数据。
-
DataFlash日志文件可以用MAVProxy,APM Planner 2或Mission Planner打开和检查。
-
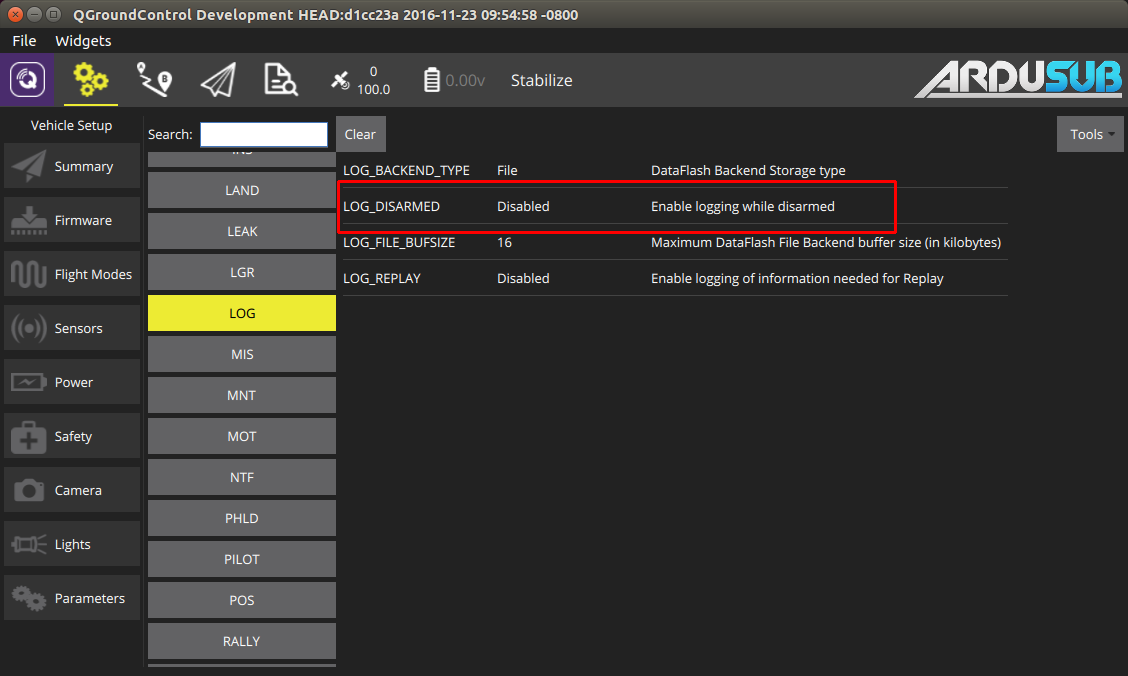
默认情况下,当自动驾驶仪在引导后第一次启动时,将创建一个新的DataFlash日志。DataFlash日志将继续,直到自动驾驶仪关闭。
-
LOG_DISARMED参数可以设置为“Enabled”,以便在引导自动驾驶仪时(即使在启动前)立即开始DataFlash日志。
-
DataFlash日志可以通过两种方式检索:
- 从Pixhawk中删除Micro SD卡,并将其插入您的计算机,以查看和传输日志使用文件浏览器,如普通USB驱动器。
- 通过QGroundControl或MAVProxy远程下载日志.
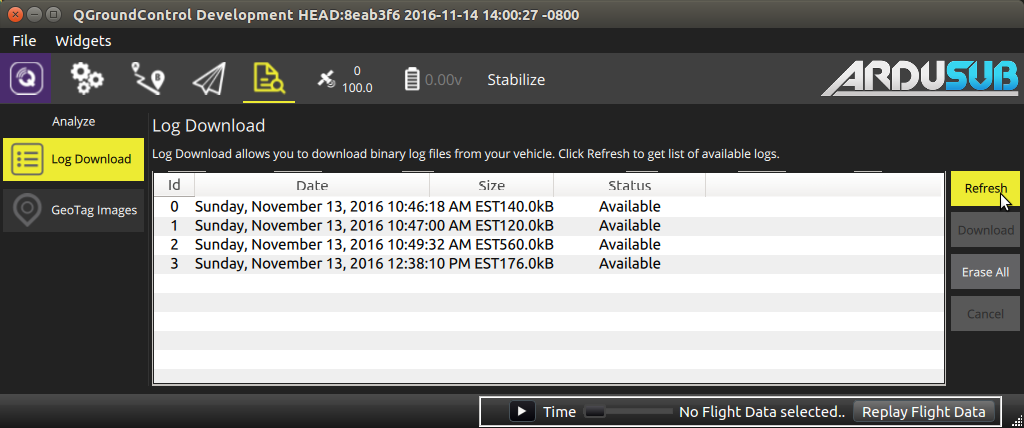
(3)通过QGroundControl记录下载
- 单击窗口顶部的“分析”图标。图标看起来像文档上的放大镜。
- 单击“刷新”按钮查看可用的日志。
- 选择您要下载的日志,然后单击“下载”。
- 通过在单击“下载”之前突出显示所需的日志,可以下载多个日志。
(4)通过MAVProxy记录下载
- 在通过MAVProxy连接到自动驾驶仪时,在MAVProxy控制台中键入“日志列表”以列出自动驾驶仪上可用的DataFlash日志。
- 键入“日志下载X”以下载日志编号X.
- 当日志下载时,您可以键入“日志状态”以查看下载的状态,或者“日志取消”取消下载。
问题报告
- ArduSub问题:对于在Pixhawk上运行并控制ROV的ArduSub软件相关的任何事情,报告ArduSub Github问题页面上的问题。如果您不确定应该在哪里发布您的问题,可以在此处举报。
- QGroundControl问题:对于任何与QGroundControl软件,操纵杆设置,视频流等相关的,请报告在QGroundControl Github问题页面上的问题。
- 文档:对于与此处的文档和说明相关的任何内容,请报告ArduSub文档Github问题页面上的问题。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号