



















ROS2与Matlab入门教程-开始使用ROS2
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
介绍如何在Matlab设置ROS2
-
介绍如何获取有关ROS2网络中的功能的信息
-
介绍如何获取有关ROS2消息的信息
步骤:
-
初始化ROS2网络,与ROS不同,ROS2不需要在MATLAB中进行初始化
-
ROS2网络自动从创建节点开始
-
ros2node创建节点
test1 = ros2node( "/test1" )
test1 =
ros2node with properties:
Name: '/test1'
ID: 0- ros2 node list查看ROS2网络中的所有节点
ros2 node list
/test1- clear 关闭 ROS 2 网络中的节点
clear test1
- 使用exampleHelperROS2CreateSampleNetwork示例发布者和订阅者使用三个附加节点填充ROS网络
exampleHelperROS2CreateSampleNetwork- 再次使用ros2 node list,并观察到有三个新节点node_1、node_2和node_3
ros2 node list
/node_1
/node_2
/node_3- ROS2网络当前状态的可视化表示如下所示
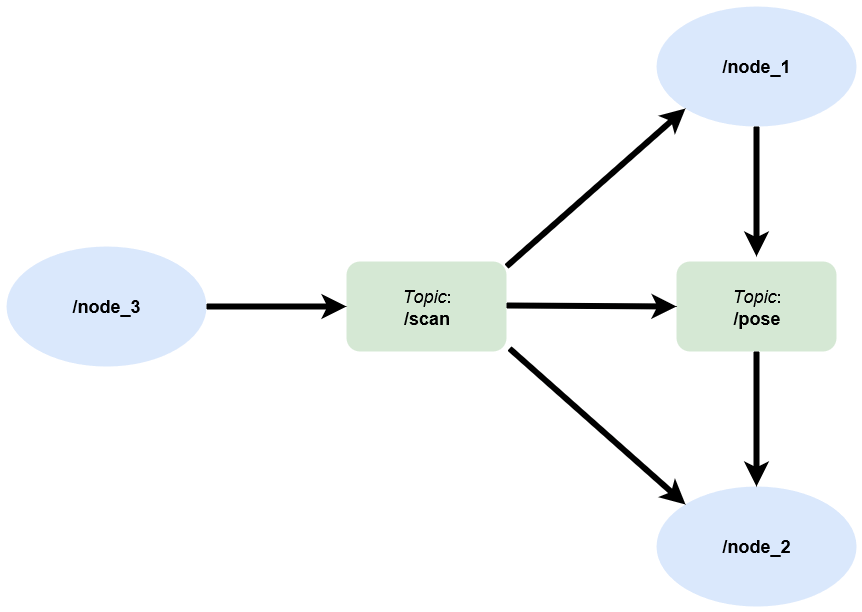
-
ros2 topic list查看ROS2网络中的可用主题
-
观察有三个的主题/pose:/parameter_events和/scan。主题/parameter_events是一个全局主题,始终存在于ROS2网络中。节点使用它来监视或更改网络中的参数。其他两个主题 /scan和 /pose是作为示例网络的一部分创建的
ros2 topic list
/parameter_events
/pose
/rosout
/scan- 每个主题都与一个消息类型相关联。用于ros2 topic list -t 查看主题的消息类型
ros2 topic list -t
Topic MessageType
_____________________ _________________________________
{'/parameter_events'} {'rcl_interfaces/ParameterEvent'}
{'/pose' } {'geometry_msgs/Twist' }
{'/rosout' } {'rcl_interfaces/Log' }
{'/scan' } {'sensor_msgs/LaserScan' }- ros2 msg show查看消息类型的属性。geometry_msgs/Twist消息类型有两个属性,Linear和Angular。每个属性都是一个类型的消息,geometry_msgs/Vector3它又具有三个类型的属性double。
ros2 msg show geometry_msgs/Twist
# This expresses velocity in free space broken into its linear and angular parts.
Vector3 linear
Vector3 angular
ros2 msg show geometry_msgs/Vector3
# This represents a vector in free space.
# This is semantically different than a point.
# A vector is always anchored at the origin.
# When a transform is applied to a vector, only the rotational component is applied.
float64 x
float64 y
float64 z-
ros2 msg list查 MATLAB中可用的消息类型的完整列表
-
断开与ROS2网络的连接,exampleHelperROS2ShutDownSampleNetwork从ROS2网络中删除示例节点、发布者和订阅者。要删除您自己的节点,请clear与节点、发布者或订阅者对象一起使用
exampleHelperROS2ShutDownSampleNetwork纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号