



















ROS2与Matlab入门教程-在Simulink中发布和订阅ROS2消息
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何使用Simulink发布和订阅ROS2主题
步骤:
- 输入以下命令
open_system( 'simulinkPubSubROS2Example' );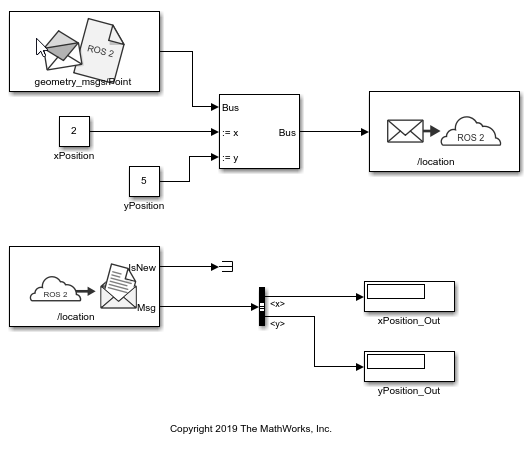
-
使用 Blank Message 和 Bus Assignment 模块来指定'geometry_msgs/Point'消息类型的 x 和 y 值。
-
打开空白消息块掩码以指定消息类型。将采样时间设置为 0.01。打开 Bus Assignment 模块掩码以选择要分配的信号。'???'从右列中删除任何值。为 Bus Assignment 模块提供 x 和 y 的相关值
-
将Bus输出提供给 Publish 块。
-
打开块掩码并选择Specify your own作为主题源。指定主题,'/location'和消息类型,'geoemetry_msgs/Point'。将采样时间设置为 0.01
-
添加订阅块并指定主题和消息类型。将输出馈送Msg到总线选择器并在模块掩码中指定所选信号。显示 x 和 y 值
-
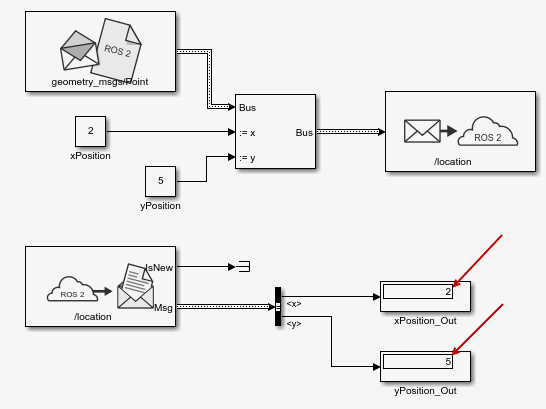
将仿真停止时间设置为Inf并运行模型。您应该会看到xPosition_Out和yPosition_Out显示发布到 ROS 2 网络的相应值
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号