



















ROS机器人Diego制作7-ROS语音系统之sphinx
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS机器人Diego制作7-ROS语音系统之sphinx
说明:
- 介绍如何接入语音控制系统sphinx
- 参考其他sphinx接入教程
sphinx接入方法
- 在ROS kinetic这个版本中是没有安装sphinx的,需要手动安装
- 安装如下依赖包:
sudo apt-get install ros-kinetic-audio-common
sudo apt-get install libasound2
sudo apt-get install gstreamer0.10-*
sudo apt-get install python-gst0.10安装libsphinxbase1
- 下载的网站:https://packages.debian.org/jessie/libsphinxbase1
- 由于Diego使用的是树莓派平台,所以请下载armhf版本的
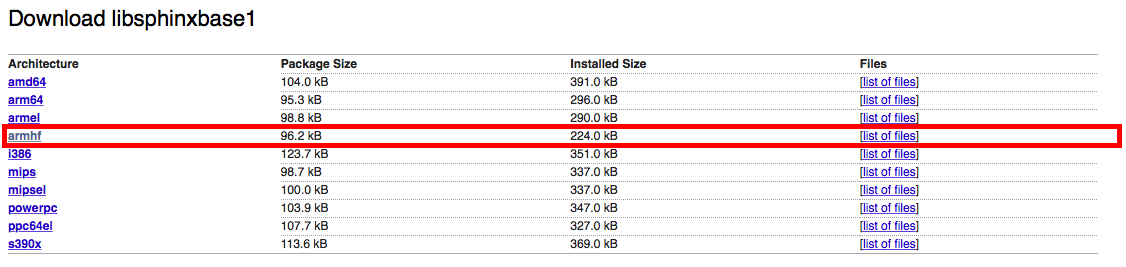
- 下载完后执行
sudo dpkg -i libsphinxbase1_0.8-6_amdhf.deb安装libpocketsphinx1
- 下载的网站:https://packages.debian.org/jessie/libpocketsphinx1
- 也下载armhf版本,下载完成后后执行
sudo dpkg -i libpocketsphinx1_0.8-5_amdhf.deb安装gstreamer0.10-pocketsphinx
- 下载的网站:https://packages.debian.org/jessie/gstreamer0.10-pocketsphinx
- 同样下载armhf版本,下载完后执行
sudo dpkg -i gstreamer0.10-pocketsphinx_0.8-5_amdhf.deb安装pocketsphinx
- 进入工作目录,克隆git目录
cd ~/catkin_ws/src
Git clone https://github.com/mikeferguson/pocketsphinx- 下载英文语音包pocketsphinx-hmm-en-tidigits (0.8-5)
- 下载的网站:https://packages.debian.org/jessie/pocketsphinx-hmm-en-tidigits
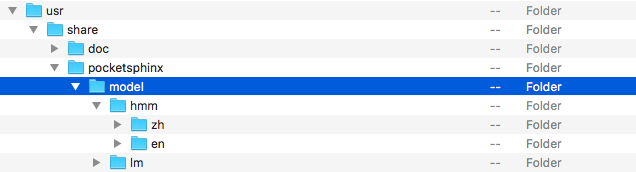
- 在包pocketsphinx下面建一个model目录,存放语音模型文件
cd ~/catkin_ws/src/pocketsphinx
mkdir model- 将下载好的语音文件,解压后,将其中的model文件下的所有文件拷贝到~/catkin_ws/src/pocketsphinx/model下
- 在~/catkin_ws/src/pocketsphinx目录下新建launch文件夹,创建diego_voice_test.launch文件
cd ~/catkin_ws/src/pocketsphinx
mkdir launch
vi diego_voice_test.launch- diego_voice_test.launch文件内容如下
<launch>
<node name="recognizer" pkg="pocketsphinx" type="recognizer.py" output="screen">
<param name="lm" value="$(find pocketsphinx)/model/lm/en/tidigits.DMP"/>
<param name="dict" value="$(find pocketsphinx)/model/lm/en/tidigits.dic"/>
<param name="hmm" value="$(find pocketsphinx)/model/hmm/en/tidigits"/>
</node>
</launch>- 修改recognizer.py文件,在def init(self):函数中增加hmm参数的读取
def __init__(self):
# Start node
rospy.init_node("recognizer")
self._device_name_param = "~mic_name" # Find the name of your microphone by typing pacmd list-sources in the terminal
self._lm_param = "~lm"
self._dic_param = "~dict"
self._hmm_param = "~hmm" #增加hmm参数
# Configure mics with gstreamer launch config
if rospy.has_param(self._device_name_param):
self.device_name = rospy.get_param(self._device_name_param)
self.device_index = self.pulse_index_from_name(self.device_name)
self.launch_config = "pulsesrc device=" + str(self.device_index)
rospy.loginfo("Using: pulsesrc device=%s name=%s", self.device_index, self.device_name)
elif rospy.has_param('~source'):
# common sources: 'alsasrc'
self.launch_config = rospy.get_param('~source')
else:
self.launch_config = 'gconfaudiosrc'
rospy.loginfo("Launch config: %s", self.launch_config)
self.launch_config += " ! audioconvert ! audioresample " \
+ '! vader name=vad auto-threshold=true ' \
+ '! pocketsphinx name=asr ! fakesink'
# Configure ROS settings
self.started = False
rospy.on_shutdown(self.shutdown)
self.pub = rospy.Publisher('~output', String)
rospy.Service("~start", Empty, self.start)
rospy.Service("~stop", Empty, self.stop)
if rospy.has_param(self._lm_param) and rospy.has_param(self._dic_param):
self.start_recognizer()
else:
rospy.logwarn("lm and dic parameters need to be set to start recognizer.")- 在def start_recognizer(self):函数hmm参数的代码,如下:
def start_recognizer(self):
rospy.loginfo("Starting recognizer... ")
self.pipeline = gst.parse_launch(self.launch_config)
self.asr = self.pipeline.get_by_name('asr')
self.asr.connect('partial_result', self.asr_partial_result)
self.asr.connect('result', self.asr_result)
self.asr.set_property('configured', True)
self.asr.set_property('dsratio', 1)
# Configure language model
if rospy.has_param(self._lm_param):
lm = rospy.get_param(self._lm_param)
else:
rospy.logerr('Recognizer not started. Please specify a language model file.')
return
if rospy.has_param(self._dic_param):
dic = rospy.get_param(self._dic_param)
else:
rospy.logerr('Recognizer not started. Please specify a dictionary.')
return
#读取hmm属性,从配置文件中
if rospy.has_param(self._hmm_param):
hmm = rospy.get_param(self._hmm_param)
else:
rospy.logerr('Recognizer not started. Please specify a hmm.')
return
self.asr.set_property('lm', lm)
self.asr.set_property('dict', dic)
self.asr.set_property('hmm', hmm) #设置hmm属性
self.bus = self.pipeline.get_bus()
self.bus.add_signal_watch()
self.bus_id = self.bus.connect('message::application', self.application_message)
self.pipeline.set_state(gst.STATE_PLAYING)
self.started = True启动shpinx
- 新终端,运行
roscore- 新终端,运行
roslaunch pocketsphinx diego_voicd_test.launch测试语音效果:
-
现在可以对着你的机器人说话了,注意要说语音模型字典中的单词
-
适合的语音命令:

- sphinx对于特定的语音环境识别还是不错的,但是一旦环境发生变化,有了不同的噪音,识别率会显著降低
- 这也是现在语音识别技术所面临的共同难题
语音合成
- 在ROS中已经集成了完整的语音合成包source_play,只支持英文的语音合成,执行如下命令,即可测试
rosrun sound_play soundplay_node.py
rosrun sound_play say.py "hi, i am diego."纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号