



















ROS机器人Diego制作18-模拟环境测试moveit
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS机器人Diego制作18-模拟环境测试moveit
说明:
- 介绍Rviz的模拟环境下对Moveit进行测试
- Moveit 配置完成后,我们就可以在Rviz的模拟环境下对Moveit进行测试,以矫正urdf文件,及相关的配置,待都符合机器人的设计要求后,就可以把配置好的moveit移植到实际的机器人diego上运行。
步骤:
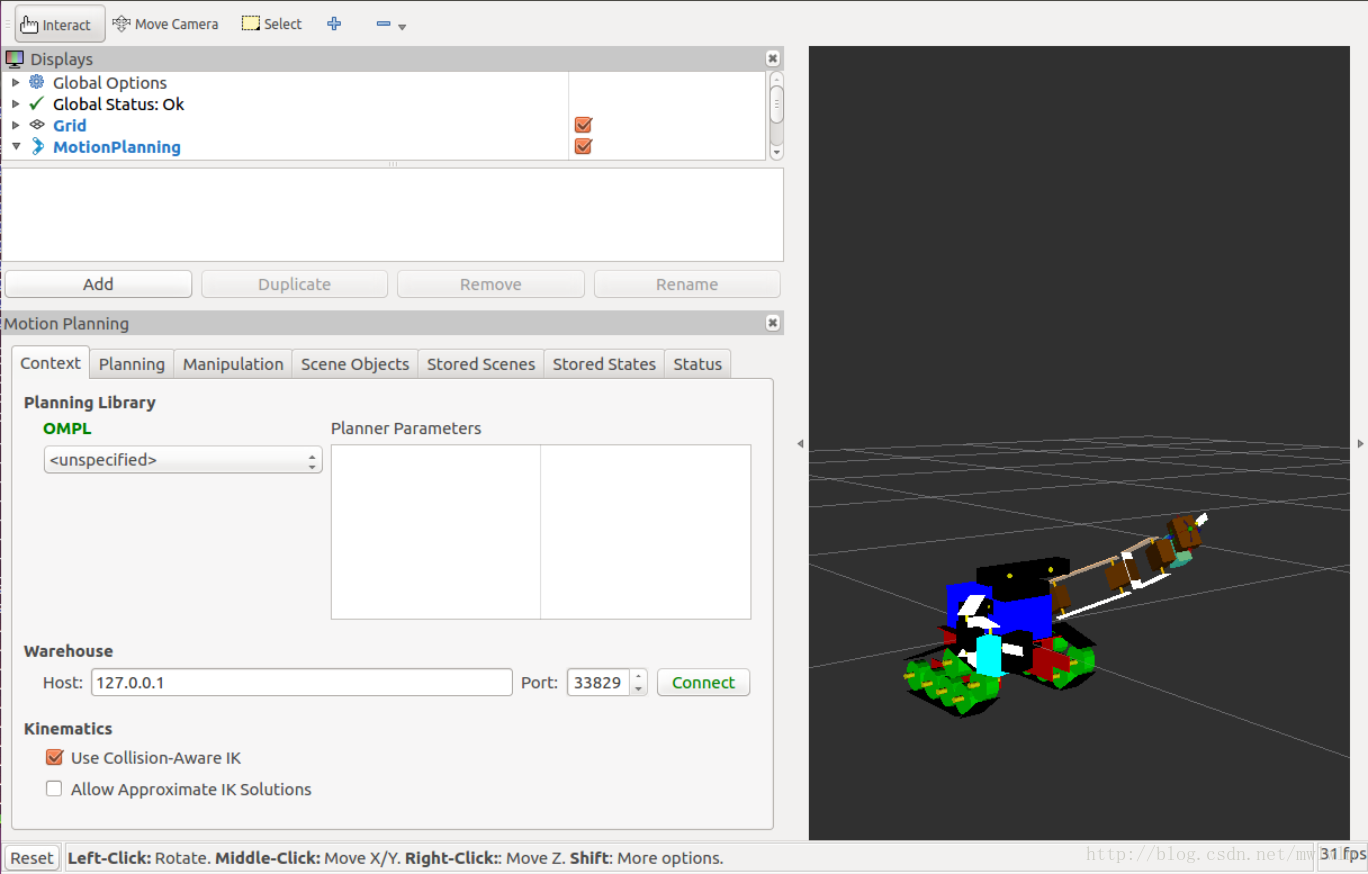
- 首先我们启动moveit的demo模式,执行如下命令:
roslaunch diego_moveit_config demo.launch-
注意这里的diego_moveit_config是存放moveit配置文件的包名,这可以根据实际情况进行修改,启动后如下图所示:
-
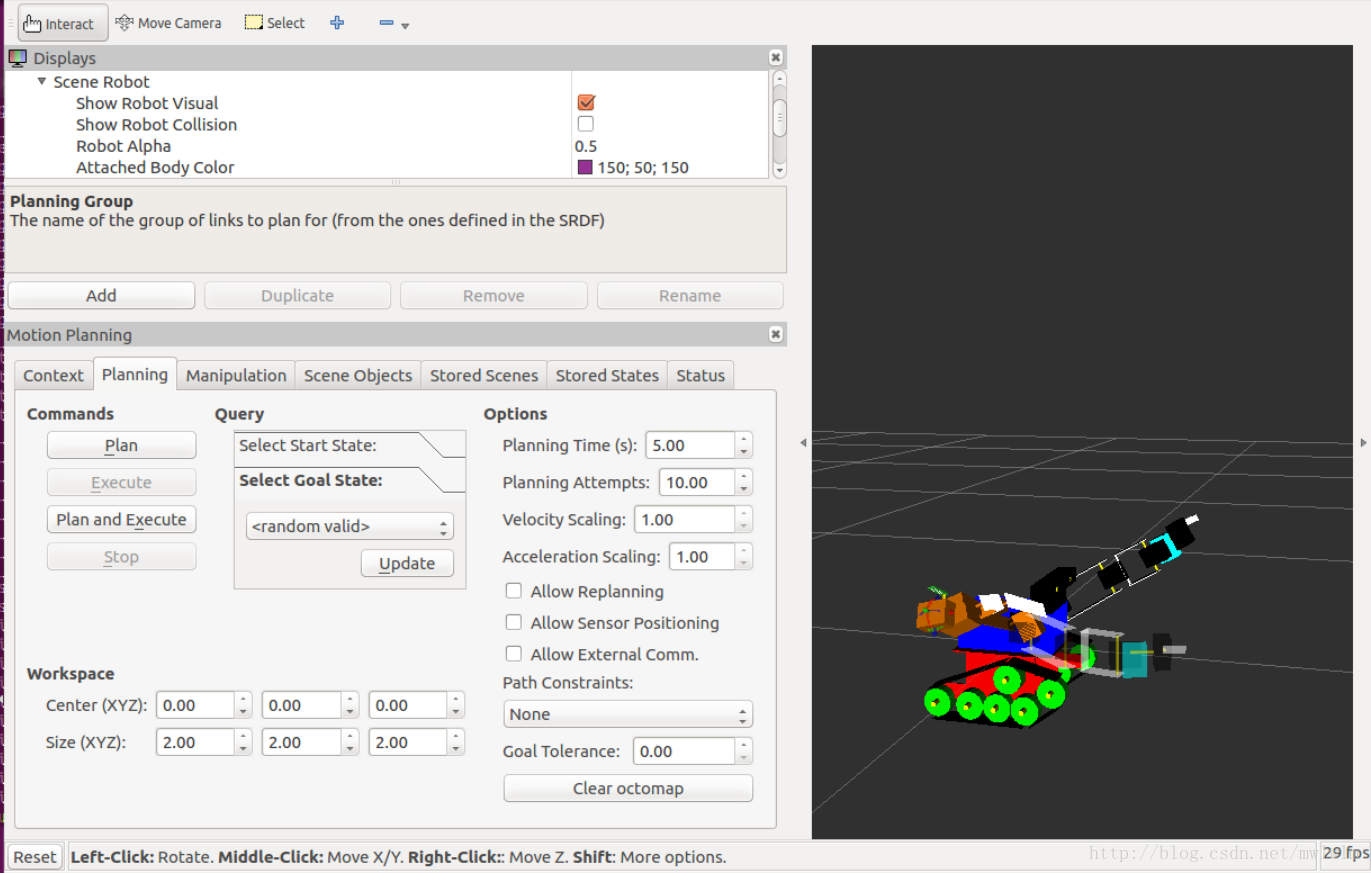
设置planning
-
这时我们选择左下角Motion Planning的Planning标签页,在Query下面可以设置开始pose,和目标pose,在这里我们针对right arm设置,选择随机的目标pose,点击update,可以看到rigth arm会的随机目标状态
-
在上图中,右臂黄色部分是目标的位置,阴影部分是开始的位置,点击Plan and Execute就会反复执行从开始状态,到目标状态的动作
-
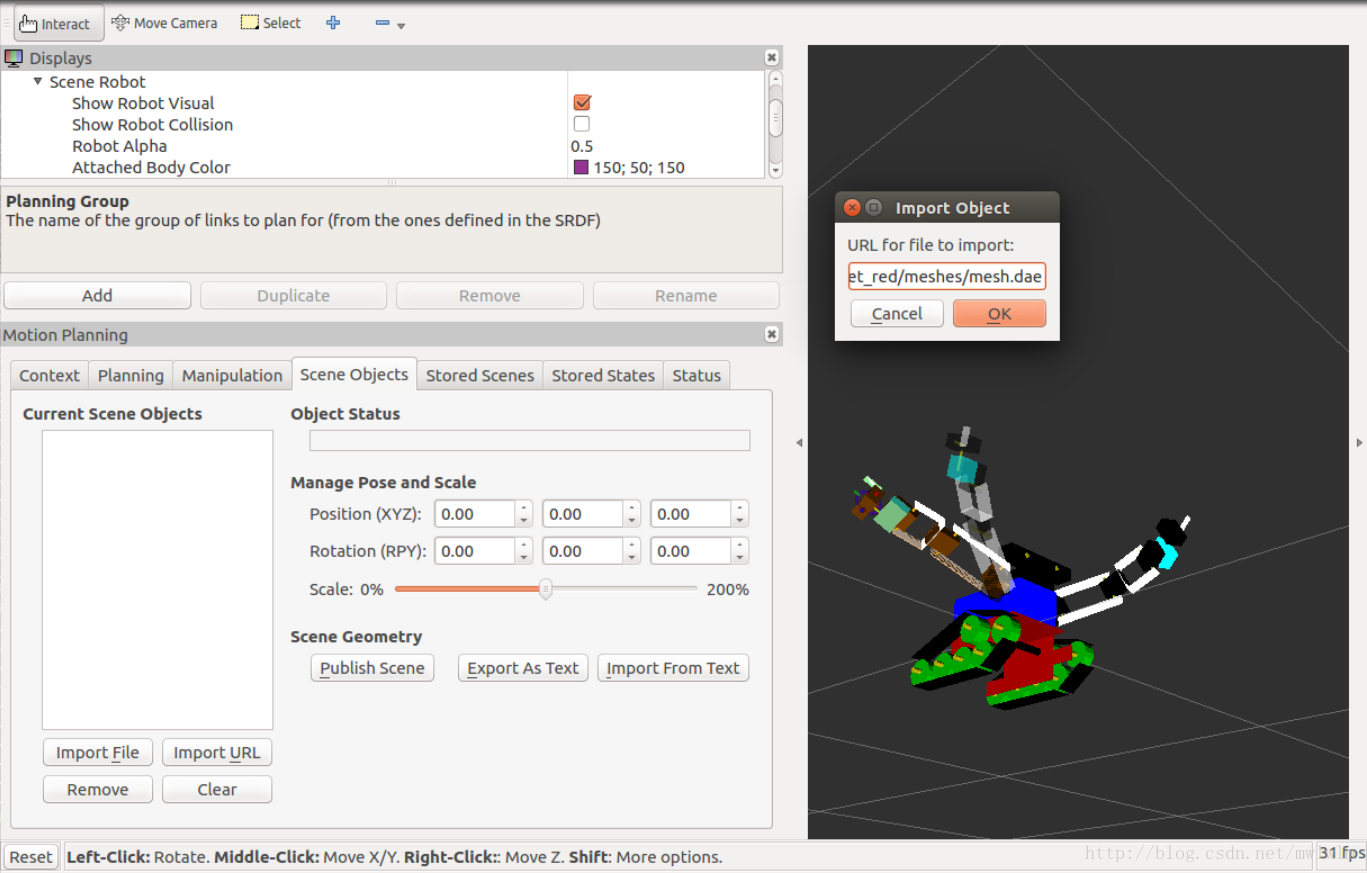
在机器人面前添加一个方形的箱子
-
在http://models.gazebosim.org网站有很多标准化的mesh文件,我们只要在Scene Objects标签页中点击import URL,在弹出的回话框中输入对应物体的mesh文件就可以载入相应的物体
-
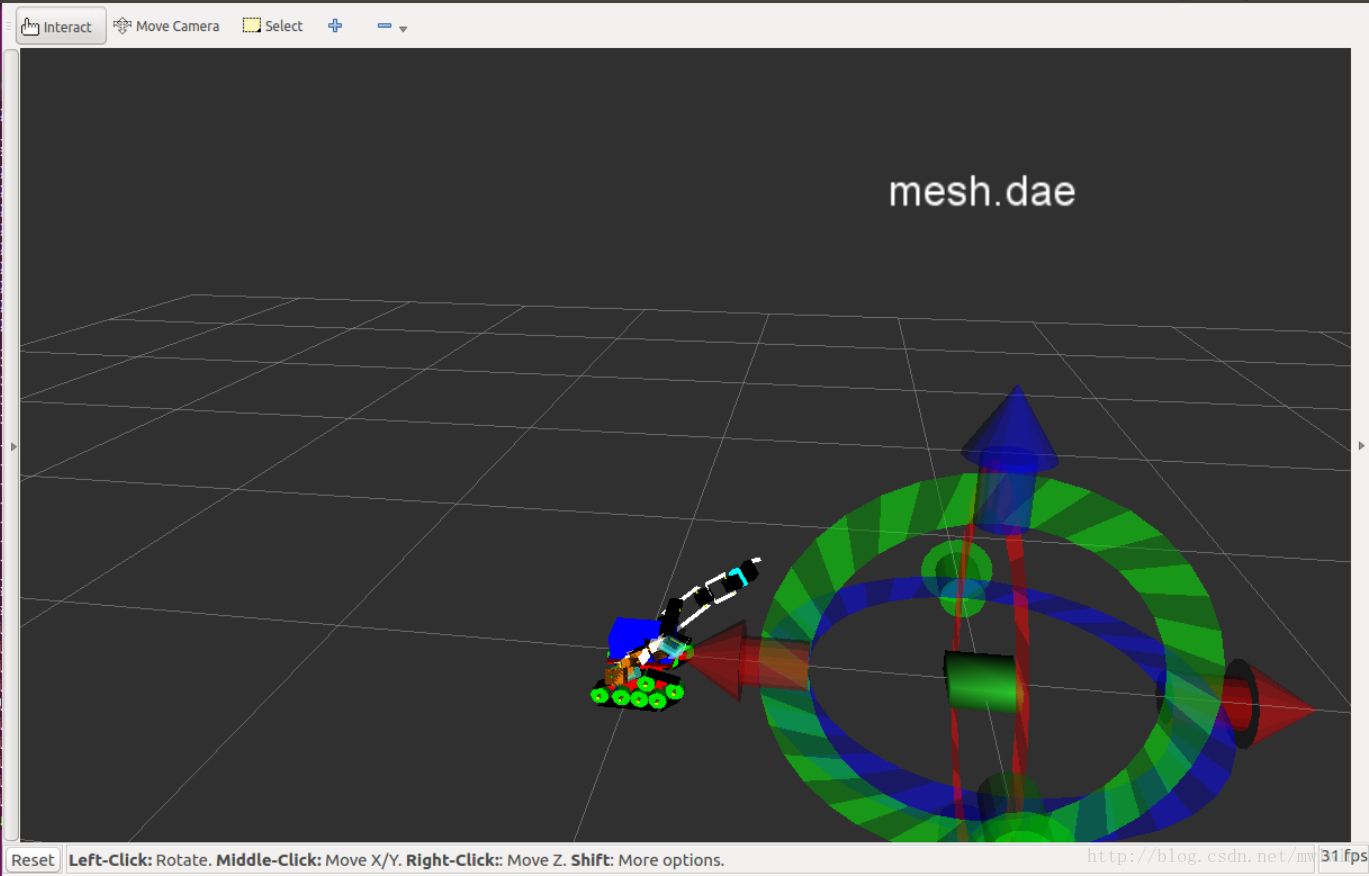
可以调整Scale滑动按钮,调整物体的大小,positon可以调整物体的位置,Rotation可以旋转物体
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号