



















ROS机器人Diego制作1-机器人硬件清单
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS机器人Diego制作1-机器人硬件清单
说明:
- 介绍教程需要的硬件
- 均采用开源软硬件,可以方便在淘宝购买
硬件清单:
| 序号 | 物料名称 | 说明 |
|---|---|---|
| 1 | 树莓派3 B+ | 作为上位机,安装ROS机器人操作系统 |
| 2 | Arduino UNO | 作为下位机,实现对底盘等硬件设备的控制 |
| 3 | 底盘 | 可以自己到淘宝上选,注意一定要带码盘测速的,因为ROS要精确控制 |
| 4 | 电源模块 | 为树莓派3提供5V2.5A的电源 |
| 5 | 电源 | 9V~12V 18650充电电池 |
| 6 | Arduino 电机驱动板,Arduino电机驱动板 | L298P占有IO少 |
| 7 | 机械臂 | 6自由度机械臂 |
| 8 | 其他 | 线材,六角铜柱、螺丝等 |
ROS控制模型:
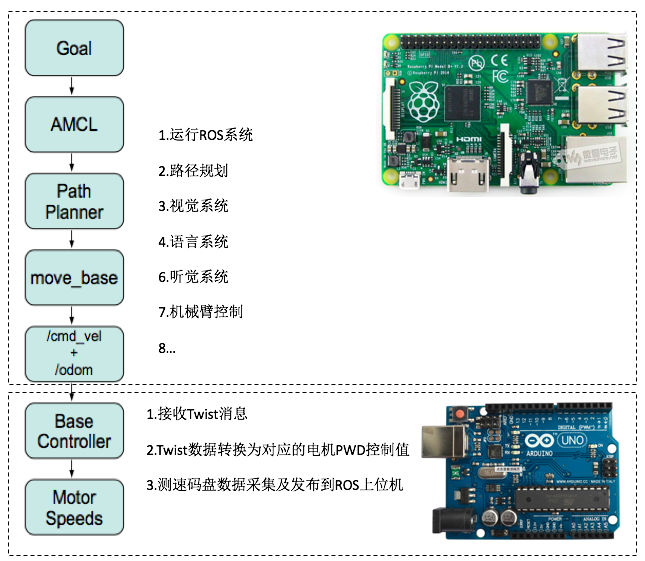
树莓派开发板:
Arduino开发板:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号