



















ROS与Matlab语言入门教程-差动机器人的路径跟踪
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
该例程演示如何使用机器人运动模型控制机器人跟踪目标路径。该例程使用“Pure Persuit”路径跟踪控制器驱动仿真机器人沿着预先决定的路径运动。要求的路径时一系列的陆标,该陆标是明确定义的或者由路径规划器计算的得到。创建仿真差动机器人的“Pure Persuit”路径规划器,计算控制指令以跟踪给定路径。计算的控制指令用于驱动仿真机器人沿着要求的轨迹基于“Pure Persuit”控制器。
定义陆标
为机器人定义一系列要求路径的路标点。
path = [2.00 1.00;
1.25 1.75;
5.25 8.25;
7.25 8.75;
11.75 10.75;
12.00 10.00];可视化要求的路径。
plot(path(:,1), path(:,2),'k--d')
xlim([0 13])
ylim([0 13])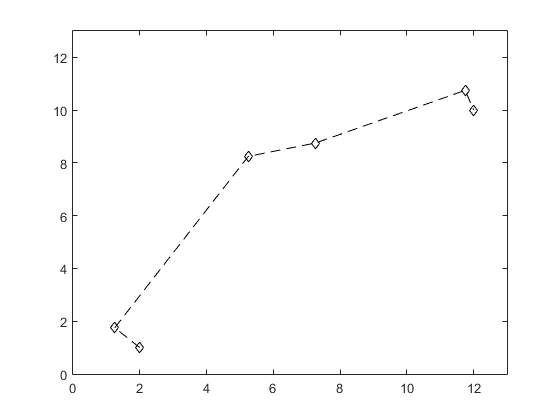
定义机器人运动模型
当没有外部仿真器或者实际机器人可用的情况下,就需要机器人运动模型。在本例中使用的仿真运动模型,根据给定的输入,更新和返回机器人的位姿。外部仿真或真实机器人将需要定位机制以提供机器人更新的位姿。
设置当前的位置和机器人的目标位置,目标位置由路径定义。
robotCurrentLocation = path(1,:);
robotGoal = path(end,:);假设机器人的初始方向(机器人的初始方向是机器人的航向和X轴正方向的夹角,以逆时针的方式测量)。
initialOrientation = 0;定义机器人的当前位姿[x,y,theta]:
robotCurrentPose = [robotCurrentLocation initialOrientation];初始化仿真机器人对象的当前位姿,仿真机器人具有两轮机器人的运动学方程。该仿真机器人对象能够基于这些运动方程和线性、角度速度输入。具备绘图的能力显示机器人的当前位置和绘制机器人的轨迹。
robot = ExampleHelperDifferentialDriveRobot(robotCurrentPose);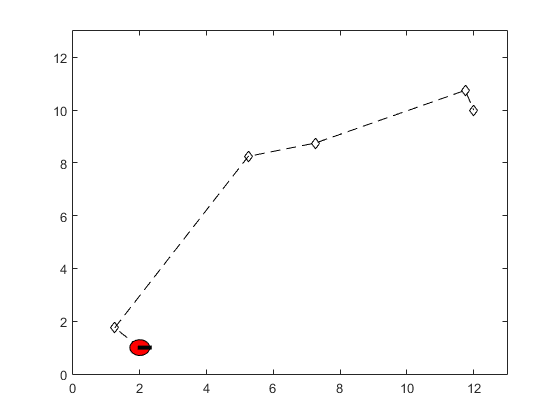
定义路径跟踪控制器
根据上文定义的路径和机器人运动模型,用户需要一个路径跟踪控制器以驱动机器人沿着路径运动。使用“robotics.PurePursuit”对象创建路径跟踪控制器。
controller = robotics.PurePursuit
controller =
System: robotics.PurePursuit
Properties:
Waypoints: []
MaxAngularVelocity: 1
LookaheadDistance: 1
DesiredLinearVelocity: 0.1使用上面定义的路径为控制器设置要求的路标。
controller.Waypoints = path;设置路径跟踪控制器的参数,本例中要求的线性速度设置为0.3m/s。
controller.DesiredLinearVelocity = 0.3;最大角速度作为旋转速度的饱和限制,本例中设置为2rad/s。
controller.MaxAngularVelocity = 2;作为一般规则,为了平滑的路径,向前的距离应该比要求的线性速度大。当向前距离大时,机器人可能抄近路。相反的,向前距离小可能时可能导致不稳定的路径跟踪表现。本例选择0.5m。
controller.LookaheadDistance = 0.5;使用路径跟踪控制器,在需要的路标驱动机器人
路径跟踪控制器为机器人提供输入控制信号,机器人使用该信号驱动自己沿着要求的路径。
定义目标半径,作为机器人最终位置和要求距离阈值,一旦机器人与目标位置的距离小于该值,则停止。此外,计算机器人的当前位置和目标位置的距离,持续的比较该值与目标半径,当该距离小于目标半径的时候,机器人将会停止。注意,如果目标半径太小可能导致机器人错过目标,这可能会导致目标附近预料之外的表现。
goalRadius = 0.1;
distanceToGoal = norm(robotCurrentLocation - robotGoal);“robotics.PurePursuit.step”函数计算控制命令给机器人,使用这些指令驱动机器人直到抵达目标半径之内。如果用户使用一个外部的仿真器或者真实机器人,那么控制器的输出需要应用到机器人,而且需要一个定位系统更新机器人的位姿。
while( distanceToGoal > goalRadius )
% Compute the controller outputs, i.e., the inputs to the robot
[v, omega] = step(controller, robot.CurrentPose);
% Simulate the robot using the controller outputs.
drive(robot, v, omega)
% Extract current location information ([X,Y]) from the current pose of the
% robot
robotCurrentLocation = robot.CurrentPose(1:2);
% Re-compute the distance to the goal
distanceToGoal = norm(robotCurrentLocation - robotGoal);
end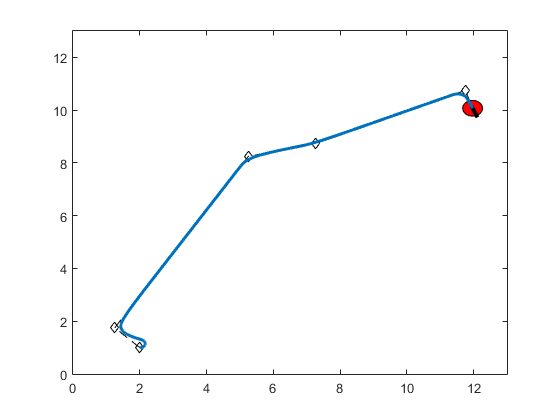
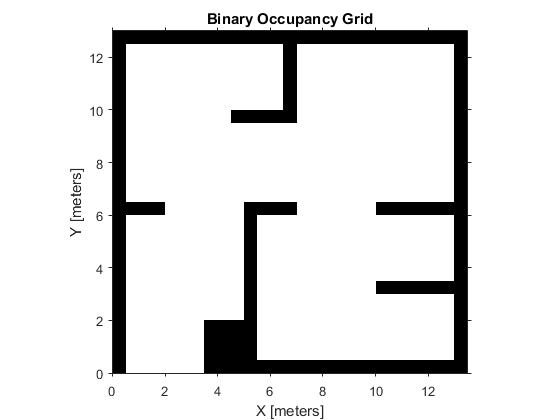
仿真机器人使用路径跟踪控制器沿着要求的路径已经到达目标位置。如果目标路标集由路径规划器计算,路径跟踪控制器应用的样式相同。导入一个简单的地图用于计算路径。
filePath = fullfile(fileparts(which('PathFollowingControllerExample')), 'data', 'exampleMaps.mat');
load(filePath)
map = robotics.BinaryOccupancyGrid(simpleMap, 2)
map =
BinaryOccupancyGrid with properties:
GridSize: [26 27]
Resolution: 2
XWorldLimits: [0 13.5000]
YWorldLimits: [0 13]
GridLocationInWorld: [0 0]显示地图:
show(map)
用户可以使用PRM路径规划算法计算路径。
robotRadius = 0.2;
mapInflated = copy(map);
inflate(mapInflated,robotRadius);
prm = robotics.PRM(mapInflated);
prm.NumNodes = 100;
prm.ConnectionDistance = 10;寻找开始位置和结束位置的路径,注意,由于PRM算法的随机性,路径将会有所不同。
startLocation = [2.0 1.0];
endLocation = [12.0 10.0];
path = findpath(prm, startLocation, endLocation)
path =
2.0000 1.0000
1.5851 1.3808
4.0668 6.7417
7.0353 8.6624
12.2282 10.3257
12.0000 10.0000显示路径:
hold on
show(prm, 'Map', 'off', 'Roadmap', 'off');
hold off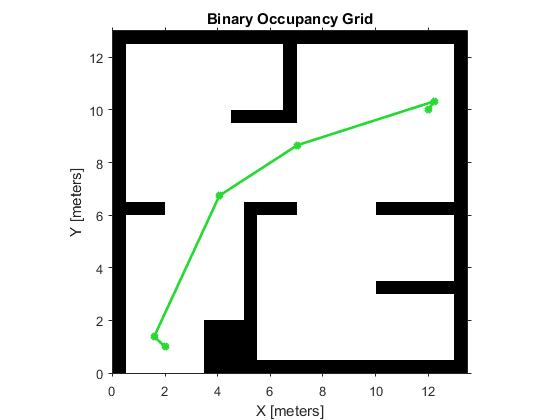
在上文定义了一个路径跟踪控制器,用户可以在本地图重新使用以计算机器人的控制指令。为了重新使用控制器和重新定义路标点,同时保持其它信息不变,使用“robotics.PurePursuit.release”函数。
release(controller)
controller.Waypoints = path;设置当前的位置和机器人的目标位置,正如路径所定义的。
robotCurrentLocation = path(1,:);
robotGoal = path(end,:);假设机器人的初始方向:
initialOrientation = 0;
定义机器人运动的当前位姿[x,y,theta]
robotCurrentPose = [robotCurrentLocation initialOrientation];使用当前位姿,重新创建仿真机器人对象。
robot = ExampleHelperDifferentialDriveRobot(robotCurrentPose);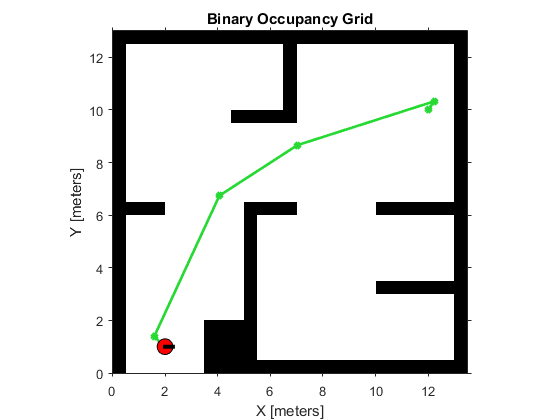
计算与目标位置的距离:
distanceToGoal = norm(robotCurrentLocation - robotGoal);定义目标半径:
goalRadius = 0.1;在给定的地图上,使用控制器的输出驱动机器人,直到抵达目标位置。
while( distanceToGoal > goalRadius )
% Compute the controller outputs, i.e., the inputs to the robot
[v, omega] = step(controller, robot.CurrentPose);
% Simulate the robot using the controller outputs
drive(robot, v, omega)
% Extract current location information from the current pose
robotCurrentLocation = robot.CurrentPose(1:2);
% Re-compute the distance to the goal
distanceToGoal = norm(robotCurrentLocation - robotGoal);
end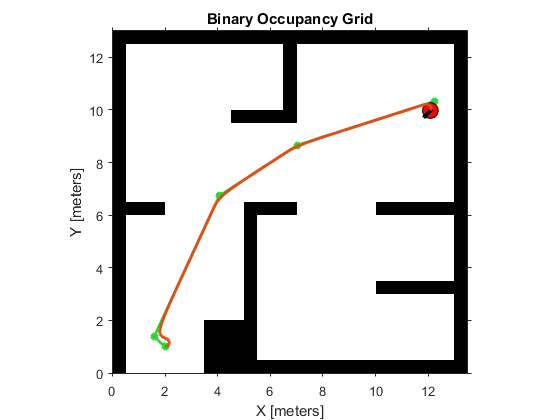
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号