



















ROS与Matlab语言入门教程-使用发布器和订阅器交换数据
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
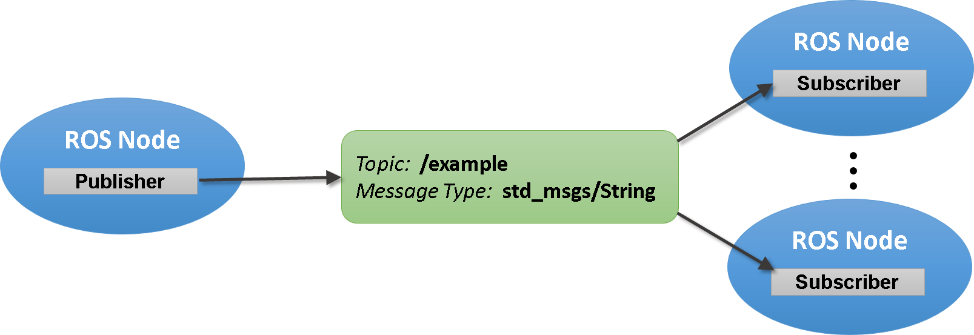
ROS节点最基本的交换数据的方式是发送和接收消息。消息通过主题传输,在ROS网络中,每一个主题都有唯一的名称。如果一个节点想要共享数据,那么它就要使用发布器将数据发送到主题。一个节点想要接收数据,需要使用接收器监听相应的主题。除了具有唯一的名称,每个主题都具有消息类型,决定主题所能传输的消息类型。
发布器/接收器具有如下特征:
-
主题用于多对多通信,多个发布器可以发送消息到同样的主题,多个接收器也可以接收同样的主题的数据。
-
发布器和接收器与主题是解耦的不挂钩的,它们可以用任何规则创建或者销毁。在主题没有接收器的情况下,消息仍然可以发送到主题上。
主题、发布器和接收器的概念如下图所示:
这个例子展示了在ROS网络中怎样发布和订阅主题,另外还展示了:
-
等待直到接收新的消息。
-
使用后台调用的形式处理新消息。
需要的预备知识:1.2开始使用ROS,1.3连接到ROS网络。
订阅和等待消息
在MATLAB®中启动ROS主控节点,创建一个带有若干发布器和接收器的采样ROS网络。代码运行示例:
rosinit
exampleHelperROSCreateSampleNetwork
Initializing ROS master onhttp://bat5136glnxa64.mathworks.com:11311/.
Initializing global node /matlab_global_node_8332 with 使用“rostopic list”指令查看可用的主题,假设你想要订阅的主题是“/scan”。代码运行示例:NodeURIhttp://bat5136glnxa64:35671/
rostopic list
/pose
/rosout
/scan使用“rostopic info”指令检查是否有节点发布数据到“/scan”主题,下面的指令显示“node_3”节点发布数据到“/scan”主题。
rostopic info /scan Type: sensor_msgs/LaserScan Publishers:
- /node_3 (http://bat5136glnxa64:53950/)
Subscribers:
-
/node_1 (http://bat5136glnxa64:49726/)
-
/node_2 (http://bat5136glnxa64:59432/)
使用“rossubscriber”指令订阅“/scan”主题,如果该主题已经存在于ROS网络中(如本例),“rossubscriber”会自动的检测消息类型,你无须指定。代码运行示例:
laser = rossubscriber('/scan')
laser =
Subscriber with properties:
TopicName: '/scan'
MessageType: 'sensor_msgs/LaserScan'
LatestMessage: [0x1 LaserScan]
BufferSize: 1
NewMessageFcn: []使用“receive”指令等待新消息(第二个参数是超时时间(s)),输出“scandata”包含了接收的数据。代码运行示例:
scandata = receive(laser,10)
scandata =
ROS LaserScan message with properties:
MessageType: 'sensor_msgs/LaserScan'
Header: [1x1 Header]
AngleMin: -0.5216
AngleMax: 0.5243
AngleIncrement: 0.0016
TimeIncrement: 0
ScanTime: 0.0330
RangeMin: 0.4500
RangeMax: 10
Ranges: [640x1 single]
Intensities: [0x1 single]一些数据类型有与之相关的方便的可视化的方式,对于LaserScan数据,“plot”指令能够绘制曲线图,其中“MaximumRange”指定了曲线的最大值范围。运行示例:
plot(scandata,'MaximumRange',7)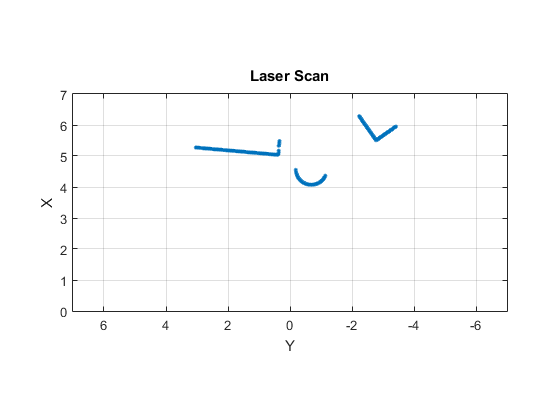
使用回调函数订阅数据
你可以指定一个回调函数接收新的消息,而不必采用“receive”指令的方法。这种方法使得其它MATLAB代码能够在订阅器等待新消息的同时继续执行。如果想要使用多个订阅器,那么回调是必须的方法。
使用“exampleHelperROSPoseCallback”回调函数,订阅“/pose”主题。一种在主工作空间和回调函数中共享数据的方法是采用全局变量。定义两个全局变量“pos”和“orient”。代码运行示例:
robotpose = rossubscriber('/pose',@exampleHelperROSPoseCallback)
global pos
global orient
robotpose =
Subscriber with properties:
TopicName: '/pose'
MessageType: 'geometry_msgs/Twist'
LatestMessage: [0x1 Twist]
BufferSize: 1
NewMessageFcn: @exampleHelperROSPoseCallback从“/pose”主题中接收到新消息时,全局变量“pos”和“orient”将在“exampleHelperROSPoseCallback”回调函数中赋值。
等待几秒钟,确认订阅器能够接收到消息,当前的位置和方向数据,将总是存放在 “pos”和“orient” 变量。代码运行示例:
pause(2)
pos
orient
pos =
-0.0725 -0.0805 -0.0628
orient =
0.0364 0.1791 0.0041如果在命令行里输入几次的“pos”和“orient”,将会看到相应的数据不断的更新。
清除订阅器变量的方式停止位姿订阅器。代码运行示例:
clear robotpose注意:除了使用全局变量,还有很多种方法从回调函数中提取信息,例如,可以传递一个句柄对象作为附加的参数到回调函数中。关于回调函数的定义详见Callback Definition文档。
发布消息
创建一个发布器,用于发送ROS字符串消息到“/chatter”主题(下回分解)。代码运行示例:
chatterpub = rospublisher('/chatter',rostype.std_msgs_String)
pause(2) % Wait to ensure publisher is setup
chatterpub =
Publisher with properties:
TopicName: '/chatter'
IsLatching: 1
NumSubscribers: 0
MessageType: 'std_msgs/String'使用“rostopic list”命令,确认“/chatter”主题在ROS网络中是可用的。代码运行示例:
rostopic list
/chatter
/pose
/rosout
/scan为“/chatter”主题定义一个订阅器,当接收到新的消息时,“exampleHelperROSChatterCallback”将会被调用,显示消息中的字符串内容。代码运行示例:
chattersub = rossubscriber('/chatter', @exampleHelperROSChatterCallback)
chattersub =
Subscriber with properties:
TopicName: '/chatter'
MessageType: 'std_msgs/String'
LatestMessage: [0x1 String]
BufferSize: 1
NewMessageFcn: @exampleHelperROSChatterCallback创建并填充一个ROS消息,用于发送到“chatter”主题。
chattermsg = rosmessage(chatterpub);
chattermsg.Data = 'hello world'
chattermsg =
ROS String message with properties:
MessageType: 'std_msgs/String'
Data: 'hello world'
Use showdetails to show the contents of the message发布一个消息到“/chatter”主题,观察到字符串被订阅器回调函数显示。
send(chatterpub,chattermsg)
pause(2)
Chatter Callback message data:
ans =
hello world一旦你发布字符串数据,“exampleHelperROSChatterCallback”函数就会被调用。
关闭ROS网络
从ROS网络中移除采样节点、发布器和订阅器,同时清除全局变量“pos”和“orient”。代码运行示例:
exampleHelperROSShutDownSampleNetwork
clear global pos orient关闭ROS主控节点并删除全局节点。代码运行示例:
rosshutdown
Shutting down global node /matlab_global_node_8332 with NodeURIhttp://bat5136glnxa64:35671/
Shutting down ROS master onhttp://bat5136glnxa64.mathworks.com:11311/.纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号