



















Arduino通讯模块-V.KEL GPS模块
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
外观
简介
- 相信你一定用过GPS设备,我们很容易在手机,平板,汽车里找到它的身影。它的用处就是帮助你在全球范围内定位自己。
- 这款兼容Arduino平台的GPS模块将GPS芯片与天线集成在了一起,安装在一个小型的塑料盒内。
- 通过TinyGPS库,就可以在Arduino上获取地理坐标(包括经纬度,海拔高度)、航速、航向、GMT时间信息。
- 另外,刷新速率也是一款GPS模块重要的性能参数。大部分手机内的GPS使用的是1Hz的刷新速率,这就意味着这种GPS每秒只能获取一组数据。而我们的GPS模块拥有1-10Hz可调节的定位更新速率,信号间隔的大大降低使得它可以应付更严苛的使用条件。(例如:快速移动的车辆)。
产品参数
芯片方案: UBX-G7020-KT
- 刷新频率: 1Hz(默认) ~ 10Hz
- TTL串口通信频率: 9600bps(默认) [可通过软件配置:4800 ,19200 ,38400 ,57600 ,115200 ,230400 ,460800,921600]
- 额定电压: 5v @ 30mA(支持3.3~5v)
- 通信频道: 56CH
- 灵敏度: -161dBm
- 精确度: 2.5m (主动) / <2m[SBAS]
- 工作温度: -40°C to 85°C
- 热启动: 1s[平均]
- 暖启动: 28s[平均]
- 冷启动: 29s[平均]
- 模块尺寸: 28288.6mm
- 外壳尺寸: 37x48x16mm
- 连接指示灯
应用
- 物品跟踪定位
- 飞行器控制
引脚说明
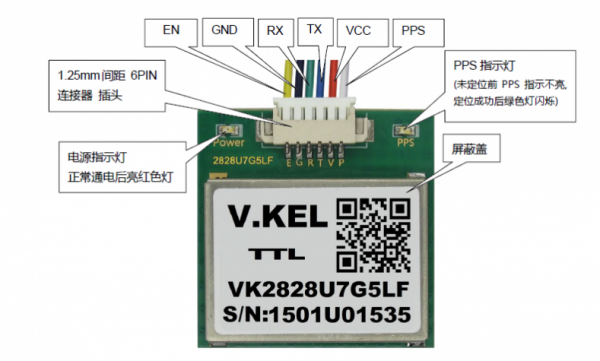
| 名称 | 颜色 | 描述 |
| PPS | 白 | 时间标准脉冲输出 |
| VCC | 红 | 系统主电源,供电电压为3.3V-5.V |
| TX | 蓝 | UART/TTL接口 |
| RX | 绿 | UART/TTL接口 |
| GND | 黑 | 接地 |
| EN | 黄 | 电源使能,高电平/悬空模组工作,低电平模组关闭 |
库说明
- 使用时,首先创建一个对象的实例,如下:
#include "TinyGPS.h"
TinyGPS gps;- 通过调用 encode() 函数将一串NMEA标准数据数据一个接一个字符得发送到对象内(TinyGPS不能处理正在取回的来自GPS模块的数据串),如果encode()回复“true”,说明一个有效的句子已经保存在了tinygps对象的内部,例如:
void loop()
{
while (Serial.available())
{
int c = Serial.read();
if (gps.encode(c))
{
// process new gps info here
}
}
}- 之后你可以查询对象得到各种各样想要的信息。为了测试得到的数据是否已过期,可以检查参数“fix_age”(可选),该参数代表从编码结束到现在的时间,以毫秒为单位。
long lat, lon;
unsigned long fix_age, time, date, speed, course;
unsigned long chars;
unsigned short sentences, failed_checksum;
// 获取经纬度值,单位为 十万分之一度
gps.get_position(&lat, &lon, &fix_age);
// 时间格式 hhmmsscc, 日期格式 ddmmyy
gps.get_datetime(&date, &time, &fix_age);
// 返回速度,单位为百分之一节
speed = gps.speed();
// 航向单位为百分之一度
course = gps.course();使用教程
GPS 与 LCD 模块结合样例代码
连线图

| GPS模块 | Arduino |
| VCC | VCC |
| GND | GND |
| RX | TX |
| TX | RX |
样例代码
库文件:TinyGPS V1.3
#include <TinyGPS.h>
#include <LiquidCrystal.h>
TinyGPS gps;
LiquidCrystal lcd(8, 9, 4, 5, 6, 7); //LCD driver pins
int led = 13;
long lat, lon;
unsigned long fix_age, time, date, speed, course;
unsigned long chars;
unsigned short sentences, failed_checksum;
//int year;
//byte month, day, hour, minute, second, hundredths;
int DEG;
int MIN1;
int MIN2;
void LAT(){ //Latitude state
DEG=lat/1000000;
MIN1=(lat/10000)%100;
MIN2=lat%10000;
lcd.setCursor(0,0); // set the LCD cursor position
lcd.print("LAT:");
lcd.print(DEG);
lcd.write(0xDF);
lcd.print(MIN1);
lcd.print(".");
lcd.print(MIN2);
lcd.print("' ");
}
void LON(){ //Longitude state
DEG=lon/1000000;
MIN1=(lon/10000)%100;
MIN2=lon%10000;
lcd.setCursor(0,1); // set the LCD cursor position
lcd.print("LON:");
lcd.print(DEG);
lcd.write(0xDF);
lcd.print(MIN1);
lcd.print(".");
lcd.print(MIN2);
lcd.print("' ");
}
void setup()
{
Serial.begin(9600); //Set the GPS baud rate.
pinMode(led, OUTPUT);
lcd.begin(16, 2); // start the library
lcd.setCursor(0,0); // set the LCD cursor position
lcd.print("GPS test"); // print a simple message on the LCD
delay(2000);
}
void loop()
{
while (Serial.available())
{
digitalWrite(led, HIGH);
int c = Serial.read(); // Read the GPS data
if (gps.encode(c)) // Check the GPS data
{
// process new gps info here
}
}
digitalWrite(led, LOW);
gps.get_position(&lat, &lon, &fix_age); // retrieves +/- lat/long in 100000ths of a degree
gps.get_datetime(&date, &time, &fix_age); // time in hhmmsscc, date in ddmmyy
//gps.crack_datetime(&year, &month, &day, //Date/time cracking
//&hour, &minute, &second, &hundredths, &fix_age);
LAT();
LON();
}结果
如上连线图所示,在室外空旷处,等待约30秒后,即可在屏幕上看到所在位置的GPS数据。
疑难解答 GPS定位准不准 决定定位精度的诸多因素 GPS怎么把经纬度转换成标准的度分秒单位
更多
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号