



















ROS与Qt5人机交互界面开发-订阅图像话题并在界面中显示
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与Qt5人机交互界面开发-订阅图像话题并在界面中显示
说明:
- 介绍如何订阅图像话题并在界面中显示
步骤:
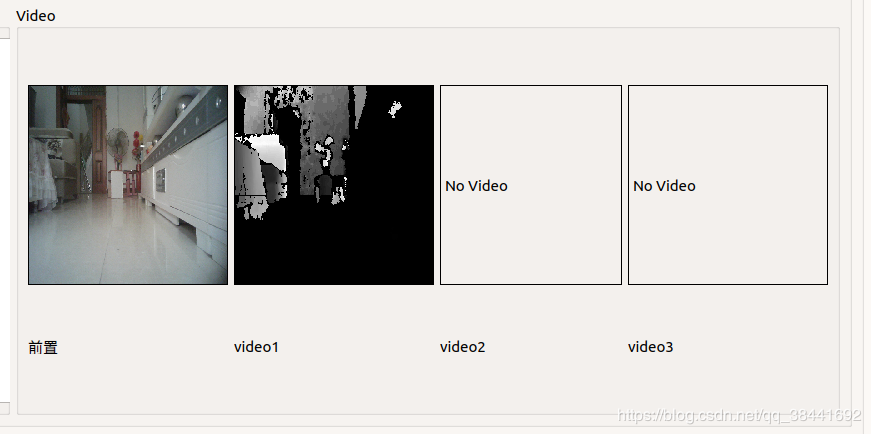
- 实现效果
- 添加依赖
- 首先在功能包的CMakeLists.txt中添加依赖
- 如图:
find_package(catkin REQUIRED COMPONENTS rviz roscpp sensor_msgs
cv_bridge
std_msgs
image_transport
)- 订阅话题
ros::NodeHandle n;
image_transport::ImageTransport it_(n);
image_sub=it_.subscribe(topic.toStdString(),100,&QNode::imageCallback0,this);- 回调函数处理图片数据
//图像话题的回调函数
void QNode::imageCallback0(const sensor_msgs::ImageConstPtr& msg)
{
cv_bridge::CvImagePtr cv_ptr;
try
{
//深拷贝转换为opencv类型
cv_ptr = cv_bridge::toCvCopy(msg, msg->encoding);
QImage im=Mat2QImage(cv_ptr->image);
emit Show_image(0,im);
}
catch (cv_bridge::Exception& e)
{
log(Error,("video frame0 exception: "+QString(e.what())).toStdString());
return;
}
}- 在toCvCopy函数中,第二个参数需要指明图像的编码格式,否者会转换失败
- 通过msg->encoding可以获取到图像话题的编码格式,传入即可。
//深拷贝转换为opencv类型
cv_ptr = cv_bridge::toCvCopy(msg, msg->encoding);- 发送自定义信号
emit Show_image(0,im);- 且将Mat类型的图片转为QImage类型图片函数:Mat2QImage
QImage QNode::Mat2QImage(cv::Mat const& src)
{
QImage dest(src.cols, src.rows, QImage::Format_ARGB32);
const float scale = 255.0;
if (src.depth() == CV_8U) {
if (src.channels() == 1) {
for (int i = 0; i < src.rows; ++i) {
for (int j = 0; j < src.cols; ++j) {
int level = src.at<quint8>(i, j);
dest.setPixel(j, i, qRgb(level, level, level));
}
}
} else if (src.channels() == 3) {
for (int i = 0; i < src.rows; ++i) {
for (int j = 0; j < src.cols; ++j) {
cv::Vec3b bgr = src.at<cv::Vec3b>(i, j);
dest.setPixel(j, i, qRgb(bgr[2], bgr[1], bgr[0]));
}
}
}
} else if (src.depth() == CV_32F) {
if (src.channels() == 1) {
for (int i = 0; i < src.rows; ++i) {
for (int j = 0; j < src.cols; ++j) {
int level = scale * src.at<float>(i, j);
dest.setPixel(j, i, qRgb(level, level, level));
}
}
} else if (src.channels() == 3) {
for (int i = 0; i < src.rows; ++i) {
for (int j = 0; j < src.cols; ++j) {
cv::Vec3f bgr = scale * src.at<cv::Vec3f>(i, j);
dest.setPixel(j, i, qRgb(bgr[2], bgr[1], bgr[0]));
}
}
}
}
return dest;
}-
链接信号
-
在mainwindows.cpp链接刚才回调函数中发出的信号:
//链接槽函数 connect(&qnode,SIGNAL(Show_image(int,QImage)),this,SLOT(slot_show_image(int,QImage)));
-
槽函数中处理信号
-
在槽函数中更新ui界面显示,在lable上显示图像:
void MainWindow::slot_show_image(int frame_id, QImage image)
{
ui.label_video0->setPixmap(QPixmap::fromImage(image).scaled(ui.label_video0->width(),ui.label_video0->height()));
}纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号