



















Pixhawk源码笔记-11.增加新的MAVLink消息
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Pixhawk源码笔记-11.增加新的MAVLink消息
说明:
- 这一节将向你介绍如何增加新的MAVLink消息
第十二部分 增加新的MAVLink消息
-
英文参考:http://dev.ardupilot.com/wiki/code-overview-adding-a-new-mavlink-message/
-
本节源自:http://liung.github.io/blog/apm/2014-09-05-APM-增加新的MAVLink通讯协议消息.html
-
MavLink协议:https://pixhawk.ethz.ch/mavlink/
-
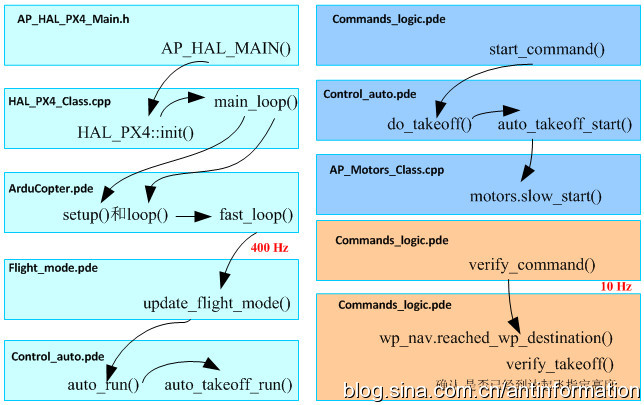
下图以自动起飞为例,简单说明了函数之间的调用关系
-
地面站之间的数据和指令通信都是通过串行接口使用MAVLink协议来传递的
-
本页面将提供关于添加新的MAVLink信息的一些高级建议
-
这些指令仅在Liunx上测试完成(准确的说,是在Windows上运行的Ubuntu虚拟机上测试完成的)
-
关于设置虚拟机的方法在SITL(软件层面仿真)页面有相关介绍。如果你要运行SITL,你最好遵循下面的一些建议
-
这些指令不能直接在Windows或者Mac平台上本地运行
-
**Step #1:**确保你已经安装了最新的ardupilot代码,同时也检查一下mavproxy是否是最新版本
-
mavproxy工具可以通过在终端窗口运行下面命令进行升级
$ sudo pip install --upgrade mavproxy-
**Step #2:**先确定你所要添加的信息的类型,以及如何和已有的MavLink消息兼容
-
比如:你可能会想要向飞行器发送一个新的导航指令,让它可以在任务中期(自动模式中)模仿一个特技动作(比如翻筋斗)
-
在这个例子中,你需要一个类似于MAV_CMD_NAV_WAYPOINT(可以在MAVLink消息页面搜索MAV_CMD_NAV_WAYPOINT)一样的新的导航指令MAV_CMD_NAV_TRICK
-
又或者你想要从飞行器发送一个新的传感器数据类型到地面站,可能类似于SCALED_PRESSURE消息
-
**Step #3:**在common.xml和ardupilotmega.xml文件中添加你的信息的定义声明
-
如果你希望将该指令添加到MAVLink协议中,那么你应该添加该指令到
../ardupilot/libraries/GCS_MAVLink/message_definitions/common.xml文件中 -
如果你仅仅个人使用或者仅仅和ArduCopter,ArduPlane,ArduRover搭配使用,那么它就应该被添加到ardupimega.xml文件中
-
**Step #4:**重新生成你的所有inlcude文件,确保添加的信息在主代码中可以被识别。
-
首先将目录切换到ardupilot文件夹下,然后执行下面命令:
$ ./libraries/GCS_MAVLink/generate.sh- 成功执行后,你应该看到下面这些文件都应经被更新。
../libraries/GCS_MAVLink/include/mavlink/v1.0/ardupilotmega/ardupilotmega.h
../libraries/GCS_MAVLink/include/mavlink/v1.0/ardupilotmega/version.h
../libraries/GCS_MAVLink/include/mavlink/v1.0/common/version.h-
文件version.h仅简单的更新了文件的日期和时间,但是ardupilotmega.h文件已经应该有了你的新消息的定义声明
-
**Step #5:**在飞行器主代码中添加函数方法用来控制向/从地面站发送/接收指令
-
这些顶层代码指令绝大部分包含在飞行器的GCS_MAVLink.pde文件中或在../libraries/GCS_MAVLink/GCS类中
-
在我们想要添加一个新的导航指令的例子中(比如执行特技动作),应该需要下面信息:
-
扩展AP_Mission库中的mission_cmd_to_mavlink()和mavlink_to_mission_cmd()方法,将mavproxy的指定转换到一个AP_Mission::Mission_Command结构体中
//将Mission_Command 对象 转换到 mavlink消息,该消息能够被发送到 GCS 地面站。
bool AP_Mission::mission_cmd_to_mavlink(const AP_Mission::Mission_Command& cmd, mavlink_mission_item_t& packet)
{… …}
//将mavlink消息转换到Mission_Command 对象,该对象可以被存储到eeprom
bool AP_Mission::mavlink_to_mission_cmd(const mavlink_mission_item_t& packet, AP_Mission::Mission_Command& cmd)
{… …}-
在飞行器的commands_logic.pde文件中分别添加start_command()函数和verify_command()函数的一个case分支,用来校验新的消息指令MAV_CMD_NAV_TRICK是否接收到
-
这些需要你调用自己创建的两个新函数do_trick()和verify_trick()(具体参考下面)
-
创建两个新函数do_trick()和verify_trick(),用来控制飞行器如何执行特技动作(这可能需要调用control_auto.pde中的另一个函数来设置auto_mode变量,然后调用新方法auto_trick_start())
-
当指令第一次被唤醒时将使用do_trick()函数。verify_trick()函数将会以10hz频率(或者更高)被重复调用直到特技动作完成,当特技动作执行完毕之后verify_trick()函数应该返回True
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号