



















Pixhawk源码笔记-04.学习RC Input and Output
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Pixhawk源码笔记-04.学习RC Input and Output
说明:
- 本教程将对APM RC Input Output接口进行讲解
第五部分 学习RC Input and Output
-
参考:http://dev.ardupilot.com/wiki/learning-ardupilot-rc-input-output/
-
RC Input,也就是遥控输入,用于控制飞行方向、改变飞行模式、控制摄像头等外围装置
-
ArduPilot支持集中不同RC input(取决于具体的硬件飞控板):、
1. PPMSum – on PX4, Pixhawk, Linux and APM2
2. SBUS – on PX4, Pixhawk and Linux
3. Spektrum/DSM – on PX4, Pixhawk and Linux
4. PWM – on APM1 and APM2
5. RC Override (MAVLink) – all boards-
其中SBUS and Spektrum/DSM是串行协议,SBUS为100kbps反UART协议,Spektrum/DSM为115200bps UART协议
-
对于PX4,这些协议是通过硬件UARTs实现的,而有些Linux系统是通过软件UARTs实现的。(原文:Some boards implement these using hardware UARTs (such as on PX4) and some implement them as bit-banged software UARTs (on Linux).)
-
RC Output,是指飞控接受到RC输入后,再将其处理后,输出到伺服和电机(电调)上
-
RC Output默认50Hz PWM信号
-
对于ArduCopter多轴飞行器和直升机,输出频率为400Hz
- RCInput对象(AP_HAL)
- RCInput 对象声明:
AP_HAL::RCInput* rcin;- 相关例程:
libraries/AP_HAL/examples/RCInput/RCInput.pde,试着动动遥控器手柄,看看输出是否符合预期
- RCOutput对象(AP_HAL)
- RCOutput对象声明:
AP_HAL::RCOutput* rcout;-
不同的飞控,代码实现有所不同,可能包含了片上定时器、I2C、经由协处理器(PX4IO)输出等程序。
-
相关例程:
libraries/AP_HAL/examples/RCOutput/RCOutput.pde这段程序从1通道到14通道,控制电机从最小转速到最大转速逐级变化
- RC_Channel对象
-
hal.rcin和hal.rcout对象,为低层次调用
-
最常用的是使用更高级封装的RC_Channel 对象来实现RC input 和 output
-
它允许用户对参数进行配置,例如每个通道min/max/trim值,同时支持辅助AUX通道函数,还可对input output进行比例缩放处理等
-
相关例程:
libraries/RC_Channel/examples/RC_Channel/RC_Channel.pde例程教你如何setup、read、copy input to output
- RC_Channel奇怪的input/output 设置
-
看代码时,有些地方程序会让你感到奇怪,有一些是由于程序代码的不完善产生的,有一些则不是
-
例如,很多变量作用在input和output上:
radio_out = (pwm_out * _reverse) + radio_trim;-
上述代码中的radio_trim,是一个trim叠加,用来修正遥控器的值
-
又例如,对于固定翼飞行器,roll(横滚)输入,成为了steer(转向 yaw)
-
对于ArduCopter中的多轴飞行器,在处于Drift模式(漂移模式)时,我们看到,pitch用于前飞,roll用于转向(而不是传统yaw用于转向)
-
以后,APM团队会将其纠正过来,将这两个概念分开。大家知道这么回事就OK了
- RC_Channel_aux 对象
-
另一个非常重要的类:RC_Channel_aux class,它是RC_Channel的子类且有很多特点可供用户使用
-
这个会有一点比较难以理解,举个例子:
-
用户想要使用通道6(Channel 6)对航拍设备的横向稳定进行控制,那么他可以将FUNCTION设置为21,枚举变量类型为” k_rudder”(偏航,偏转,转向的意思),如下:
AP_GROUPINFO("FUNCTION", 1, RC_Channel_aux, function, 21),
AP_GROUPEND- 如果程序中调用此代码,RC_Channel_aux::set_servo_out(RC_Channel_aux::k_rudder, 4500);,那么所有FUNCTION设为21(k_rudder)的通道(channel)都将输出满偏(4500就是满偏最大值)
在相应的update_aux_servo_function()代码中,
case RC_Channel_aux::k_rudder:
_aux_channels[i]->set_angle(4500);// 设置最大角度。
break;-
注意这是一对多的设置。就我的理解,其实也就是我们常说的混控输出。比如在辅助通道6中,我们可以将其他通道设置为使用function = 21。那么其他使用了21的通道,将会被通道6混控。(这个很复杂,我也没太明白,对这个有更好理解的,请一定告诉我,相互学习:30175224@qq.com。当然如果日后我能有更好的理解,我会更新本博客。)
-
下图,RC_Channel共4个通道,RC_Channel_aux共10个通道。
第一组:1、2、3、4、5、6、7、8、10、11(共10通道)
第二组:9、12
第三组:13、14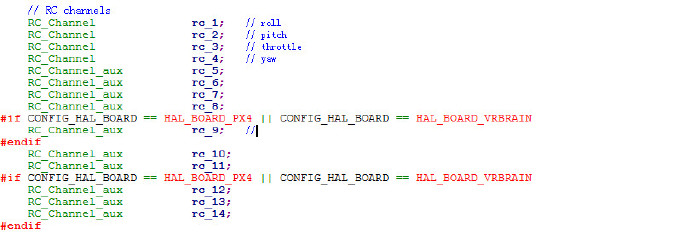
- FUNCTION参数如下:
// FUNCTION 为1-27,function参数。
typedef enum
{
k_none = 0, ///< disabled
k_manual = 1, ///< manual, just pass-thru the RC in signal
k_flap = 2, ///< flap
k_flap_auto = 3, ///< flap automated
k_aileron = 4, ///< aileron
k_unused1 = 5, ///< unused function
k_mount_pan = 6, ///< mount yaw (pan)
k_mount_tilt = 7, ///< mount pitch (tilt)
k_mount_roll = 8, ///< mount roll
k_mount_open = 9, ///< mount open (deploy) / close (retract)
k_cam_trigger = 10, ///< camera trigger
k_egg_drop = 11, ///< egg drop
k_mount2_pan = 12, ///< mount2 yaw (pan)
k_mount2_tilt = 13, ///< mount2 pitch (tilt)
k_mount2_roll = 14, ///< mount2 roll
k_mount2_open = 15, ///< mount2 open (deploy) / close (retract)
k_dspoiler1 = 16, ///< differential spoiler 1 (left wing)
k_dspoiler2 = 17, ///< differential spoiler 2 (right wing)
k_aileron_with_input = 18, ///< aileron, with rc input
k_elevator = 19, ///< elevator
k_elevator_with_input = 20, ///< elevator, with rc input
k_rudder = 21, ///< secondary rudder channel
k_sprayer_pump = 22, ///< crop sprayer pump channel
k_sprayer_spinner = 23, ///< crop sprayer spinner channel
k_flaperon1 = 24, ///< flaperon, left wing
k_flaperon2 = 25, ///< flaperon, right wing
k_steering = 26, ///< ground steering, used to separate from rudder
k_parachute_release = 27, ///< parachute release
k_epm = 28, ///< epm gripper
k_nr_aux_servo_functions ///< This must be the last enum value (only add new values _before_ this one)
} Aux_servo_function_t;
AP_Int8 function; ///< see Aux_servo_function_t enum纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号