



















ROS探索总结-17.构建完整的机器人应用系统
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
构建完整的机器人应用系统
上一篇博客介绍了HRMRP机器人平台的设计,基于该平台,可以完成丰富的机器人应用,以较为典型的机器人导航为例,如何使用HRMRP来完成相应的功能?本篇博客将详细介绍如何将HRMRP应用到实际的应用当中。
1. 系统架构
ROS作为一个分布式框架,从微观的角度讲,分布式体现在节点的布局和配置上,而从宏观的角度来讲,这种分布式可以体现在多机器人、多主机集成的系统当中。ROS社区中针对多机器人系统并没有很多的涉及,相关应用也比较少。在HRMRP机器人的基础上,我们试图去提出一种多机器人实现的框架,如下图所示:
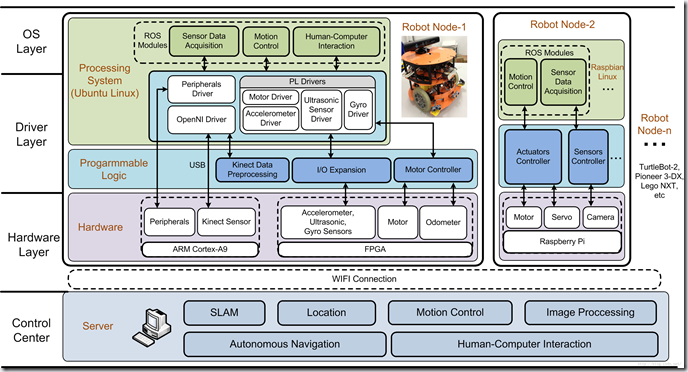
2. Server (服务器)
由于机器人架构多种多样,处理应用的能力也各不相同,在不同场合下的需求也有差异,我们设计了服务器层来提高机器人应用的计算能力,负责调度、分配多机器人应用中的任务,同时为用户提供友好、易用的人机交互界面。
分布的机器人节点与服务器都采用ROS框架设计,使用无线网络通讯,可以快速集成ROS社区中丰富的应用功能。在多机器人系统当中,通过机器人之间的信息共享和与任务协作,可以让每个机器人在充分发挥自己的能力的同时,获得更多额外的应用潜力。
3. Robot Node(机器人节点)
机器人节点是应用的执行者与信息的采集者。在该系统中可以集成多种采用ROS框架的机器人,这里以我们设计的HRMRP机器人平台为例,上一篇博客中已经进行了详细的介绍。
4. 机器人导航
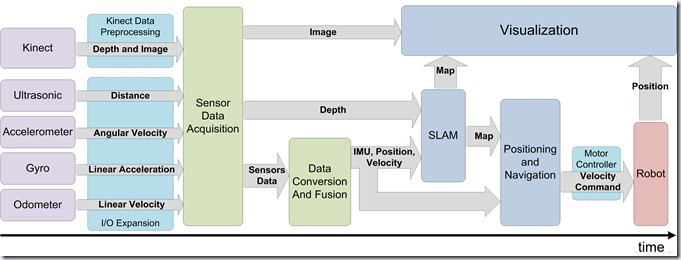
HRMRP机器人平台采用嵌入式系统作为主控,对于机器人导航等复杂算法的处理能力有限,于是我们将应用的处理在服务器端实现,机器人将采集到的周围环境信息和自身传感器信息发布,由服务器订阅消息并完成处理和显示,再向下发布控制指令。
数据的处理流程如下:
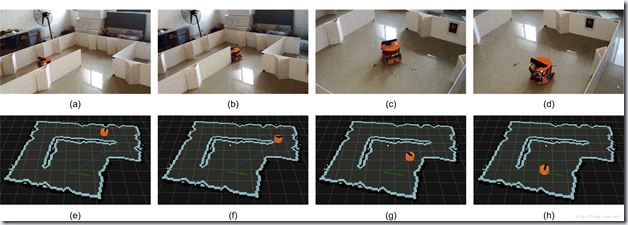
SLAM的效果如下:

导航效果如下:
5. 多机器人实验
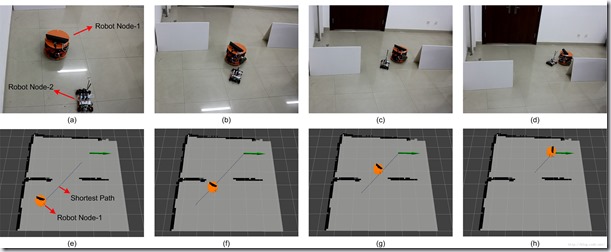
当然,该系统对多机器人的支持也是很好的,由于时间有限,我们只做了一个简单的机器人跟随实验。该实验使用了两个机器人,除HRMRP机器人之外,还使用树莓派制作了一个简单的小型机器人。在实验中,HRMRP机器人在地图上自主导航前进,服务器负责应用的处理与显示,同时将HRMRP的位置信息转发给树莓派机器人,树莓派机器人收到信息后,紧跟HRMRP。
实验效果如下:
6.相关论文
《A New ROS-based Hybrid Architecture for Heterogeneous Multi-Robot Systems》
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号