



















ROS探索总结-30.3D地图建模
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS探索总结-30.3D地图建模
说明:
- 介绍利用rgbdslam功能包进行3D地图建模
步骤:
- 安装rgbdslam功能包
在工作空间中下载代码并解压:
wget -q http://github.com/felixendres/rgbdslam_v2/archive/indigo.zip
unzip -q indigo.zip然后回到catkin_ws的目录下,安装依赖:
rosdep install rgbdslam
rosdep update依赖包安装完成后,就可以开始编译了:
catkin_make编译成功后,就可以准备建模了。
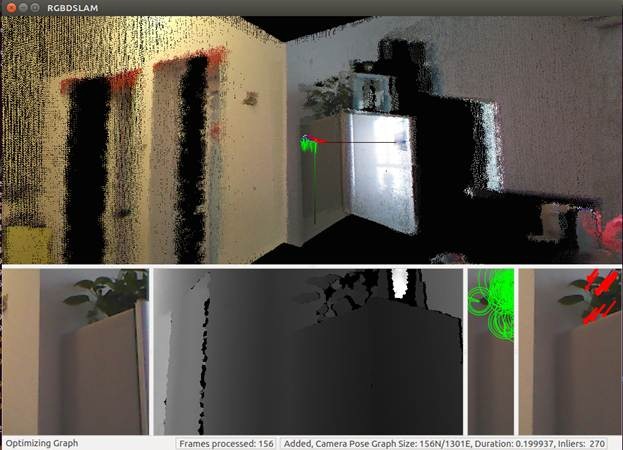
- 开始3D建模
先把kinect运行起来,然后开始建模。
roslaunch freenect_launch freenect.launch
roslaunch rgbdslam rgbdslam.launch可以把kinect放在机器人上,让机器人扫描室内的模型,也可以直接用手转动kinect,同样可以进行建模。按空格键可以停止或者开始建模。
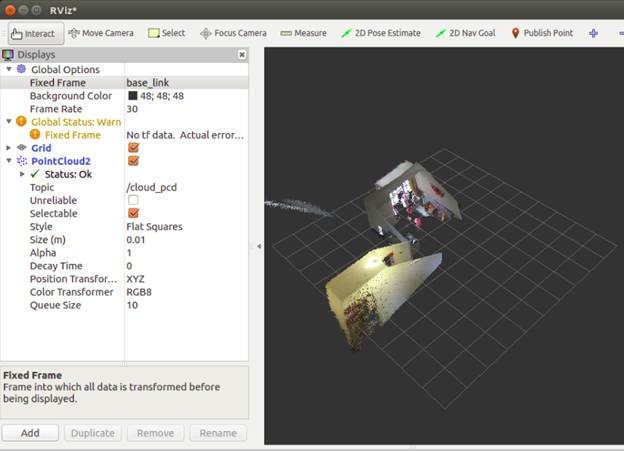
- 保存并回看地图
建模完成后,直接在菜单栏中选择保存成点云数据即可,然后就可以通过pcl_ros(http://wiki.ros.org/pcl_ros )来查看保存的点云地图了:
rosrun pcl_ros pcd_to_pointcloud quicksave.pcd在rviz中显示pointcloud2数据:
参考资料
- 视觉SLAM实战(一):RGB-D SLAM V2: http://www.cnblogs.com/gaoxiang12/p/4462518.html
- RGBDSLAMv2:https://github.com/felixendres/rgbdslam_v2
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号