



















ROS与RACECAR教程-项目介绍
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与RACECAR教程-项目介绍
说明:
- 介绍RACECAR项目起源及相关软硬件搭配
课程起源:
In January 2015, the MIT RACECAR class was held. Here’s a course description:
We will design and implement perception and planning algorithms for cars that can quickly navigate through complex environments. The class will be divided into six teams. Each team will be given one RC race car, powered by an NVIDIA Jetson embedded supercomputer as well as an inertial measurement unit, a visual odometer, a laser scanner, and a camera. We will teach not only the basics of perception and planning algorithms, but we will also show the participants how to run the Robot Operating System (ROS) on the NVIDIA platform while interfacing with sensors and actuators. At the end of the course, we will race through the MIT tunnels to determine the winning team!相关硬件:
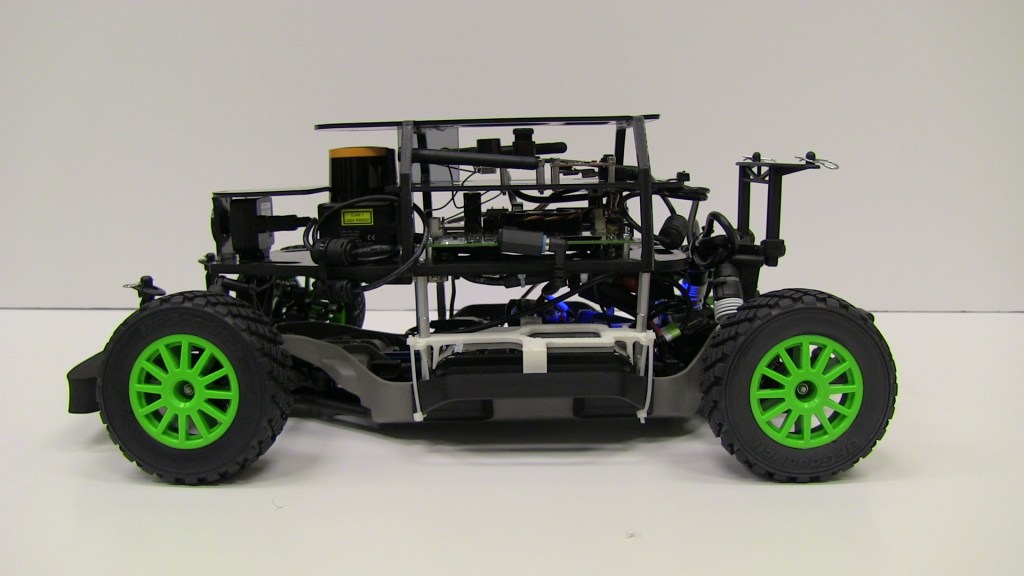
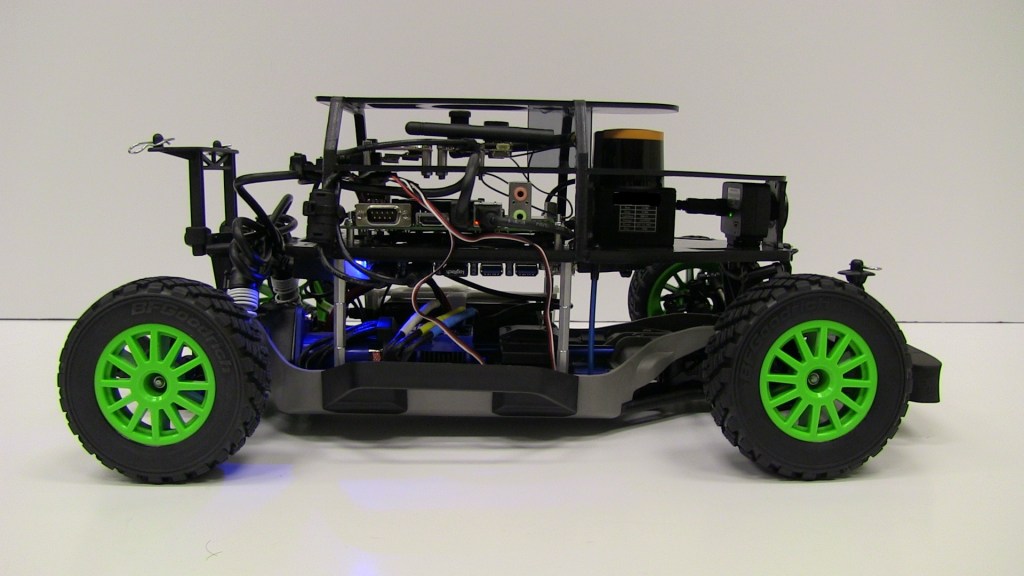
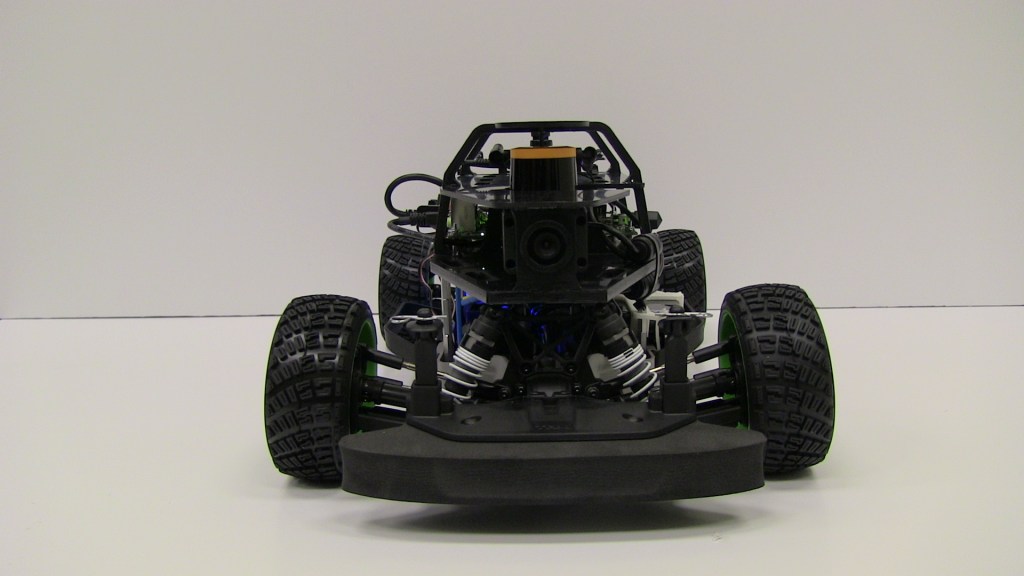
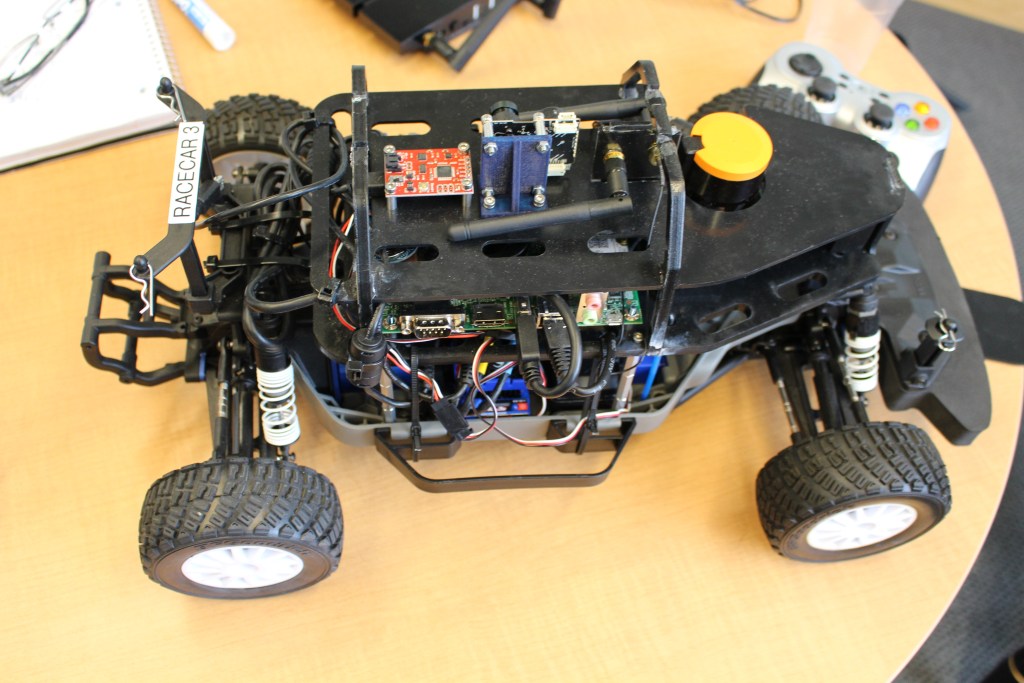
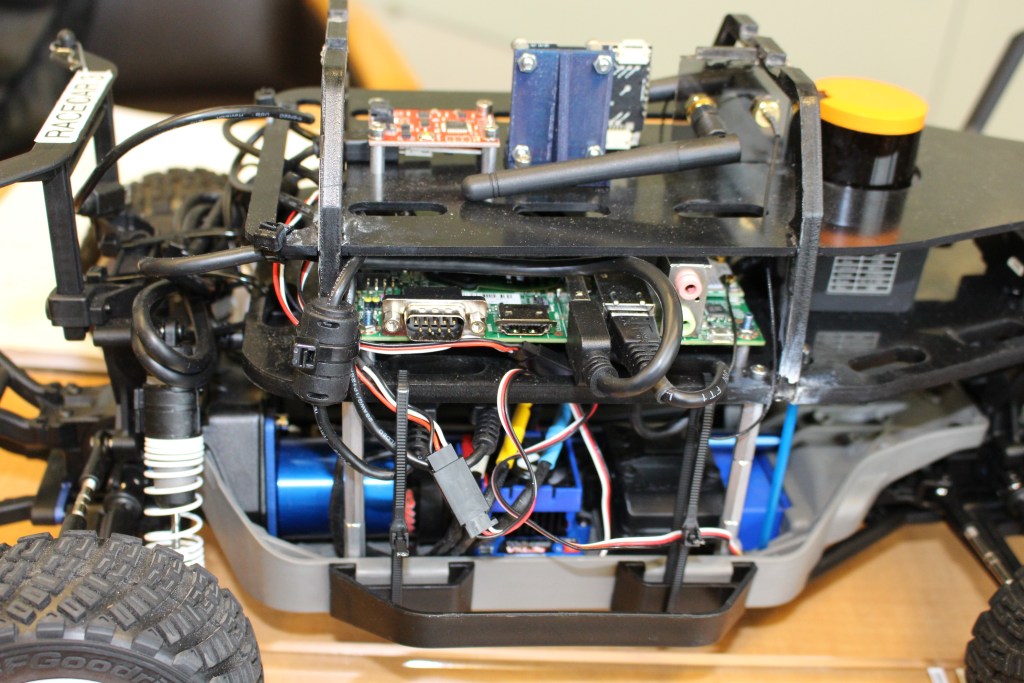
- The R/C Car – Traxxas Rally 7407
- On board computer – NVIDIA Jetson TK1 / TX1
- 2D LIDAR – Hokuyo UST-10LX
- Camera – Point Grey Firefly MV
- Battery for electronics – Energizer XP8000AB
- opto-isolator board
- Razor 9DOF IMU
- PCA9685驱动板
- 3D cameras / ZED cameras
- optical flow visual odometer/PX4FLOW (安装在顶部平台) 因分辨率不足没实际使用
- 增加亚克力板用于固定传感器,也包括部分3d打印部件
- 定制电路板连接到Jetson J3接头,增加了对Jetson GPIO信号的访问,增加了实时时钟和光隔离器。
- GPIO访问用于向车辆的伺服和电机发送PWM信号。
相关软件:
- ROS,安装在NVIDIA Jetson TK1
- 电机通过Jetson J3的PWM信号控制
- Hokuyo LIDAR 的ROS包
- 其他传感器ROS包
- JHPWMDriver代码库
图片:
参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号