



















ROS2与tf2入门教程-调试tf2
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 本教程将引导您完成调试典型 tf2 问题的步骤。
- 它还将使用许多 tf2 调试工具,例如 tf2_echo、tf2_monitor 和 view_frames。
- 本教程假设您已完成学习 tf2 教程。
调试示例
- 1 设置和启动示例
- 对于本教程,我们将设置一个有许多问题的演示应用程序。
- 本教程的目标是应用系统的方法来发现和解决这些问题。
- 首先,让我们创建源文件。
- 转到我们在 tf2 教程中创建的 learning_tf2_cpp 包。
- 在 src 目录中复制源文件 turtle_tf2_listener.cpp 并将其重命名为 turtle_tf2_listener_debug.cpp。
cd ~/tf2_ws/src/learning_tf2_cpp/src
cp turtle_tf2_listener.cpp turtle_tf2_listener_debug.cpp
vim turtle_tf2_listener_debug.cpp- 修改以下内容
std::string to_frame_rel = "turtle3";- 将lookupTransform()第 75-79 行中修改
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
this->now());
} catch (tf2::TransformException & ex) {- 修改CMakeLists.txt文件,再原来的内容基础上添加turtle_tf2_listener_debug.cpp的内容
add_executable(turtle_tf2_listener_debug src/turtle_tf2_listener_debug.cpp)
ament_target_dependencies(
turtle_tf2_listener_debug
geometry_msgs
rclcpp
tf2
tf2_ros
turtlesim
)
install(TARGETS
turtle_tf2_listener_debug
DESTINATION lib/${PROJECT_NAME})- 创建start_tf2_debug_demo.launch.py
cd ~/tf2_ws/src/learning_tf2_cpp/launch
cp turtle_tf2_demo.launch.py start_tf2_debug_demo.launch.py
vim start_tf2_debug_demo.launch.py- 修改内容如下
Node(
package='learning_tf2_cpp',
executable='turtle_tf2_listener_debug',
name='listener_debug',
parameters=[
{'target_frame': LaunchConfiguration('target_frame')}
]
),- 构建
colcon build --symlink-install --packages-select learning_tf2_cpp- 加载工作空间
. ~/tf2_ws/install/local_setup.bash测试:
- 运行
. ~/tf2_ws/install/local_setup.bash
ros2 launch learning_tf2_cpp start_tf2_debug_demo.launch.py- 键盘控制
ros2 run turtlesim turtle_teleop_key- 结果如下
[turtle_tf2_listener_debug-4] [INFO] [1630223454.942322623] [listener_debug]: Could not
transform turtle3 to turtle1: "turtle3" passed to lookupTransform argument target_frame
does not exist- 会提示错误信息,因为我们缺少坐标系turtle3,导致变换异常
问题分析:
- 查找tf2请求。
- 进入使用 tf2 的代码部分。
- 打开src/turtle_tf2_listener_debug.cpp文件,看看第 67 行
std::string to_frame_rel = "turtle3";
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
this->now());
} catch (tf2::TransformException & ex) {-
这里我们对 tf2 进行实际请求。
-
这三个参数直接告诉我们我们在问什么
-
查找在当前时间从坐标系turtle3到坐标系turtle1变换
-
检查坐标系。
-
首先,要找出 tf2 是否知道我们在turtle3和之间的转换turtle1,我们将使用tf2_echo工具.
ros2 run tf2_ros tf2_echo turtle3 turtle1- 输出告诉我们坐标系turtle3不存在:
[INFO] [1630223557.477636052] [tf2_echo]: Waiting for transform turtle3 -> turtle1:
Invalid frame ID "turtle3" passed to canTransform argument target_frame - frame doesnot exist
- 使用view_frames工具。
- 存在哪些坐标系
ros2 run tf2_tools view_frames- 打开生成
evince frames.pdf文件 - 可以看到以下输出:
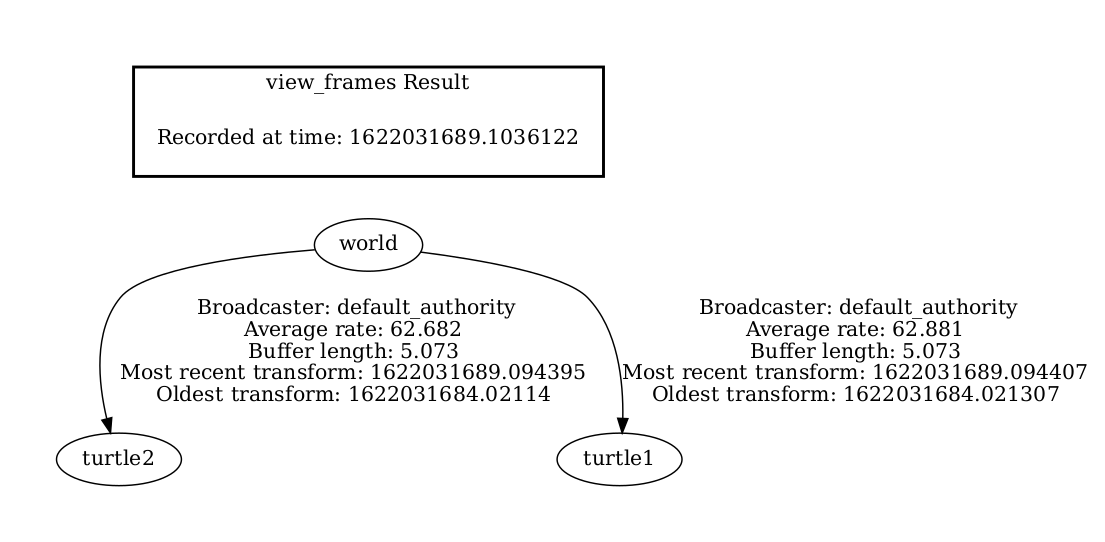
- 很明显,问题是我们正在turtle3从不存在的frame 请求转换。
- 要修复此错误,只需在第 67 行替换turtle3为turtle2 -现在停止正在运行的演示,构建它,然后再次运行它:
ros2 launch turtle_tf2 start_debug_demo.launch.py- 遇到了下一个问题,说明变换的时间不能匹配:
[turtle_tf2_listener_debug-4] [INFO] [1630223704.617382464] [listener_debug]: Could not transform turtle2 to turtle1: Lookup would require extrapolation into the future. Requested time 1630223704.617054 but the latest data is at time 1630223704.616726, when looking up transform from frame [turtle1] to frame [turtle2]- 检查时间戳。
- 现在我们解决了坐标系问题,是时候查看时间戳了。
- 请记住,我们正在尝试在当前时间(即)turtle2和之间进行转换。
- 要获取有关计时的统计信息,请使用相应的坐标系调用。
ros2 run tf2_ros tf2_monitor turtle2 turtle1- 结果应该是这样的:
RESULTS: for turtle2 to turtle1
Chain is: turtle1
Net delay avg = 0.00287347: max = 0.0167241
Frames:
Frame: turtle1, published by <no authority available>, Average Delay: 0.000295833, Max Delay: 0.000755072
All Broadcasters:
Node: <no authority available> 125.246 Hz, Average Delay: 0.000290237 Max Delay: 0.000786781- 这里的关键部分是从turtle2到turtle1的延迟。
- 输出显示平均延迟约为 3 毫秒。
- 这意味着 tf2 只能在经过 3 毫秒后才能在海龟之间进行转换。
- 所以,如果我们要求 tf2 在 3 毫秒前而不是now进行海龟之间的转换,tf2 有时可以给我们一个答案。
- 让我们通过将第 75-79 行更改为:
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
this->now() - rclcpp::Duration::from_seconds(0.1));
} catch (tf2::TransformException & ex) {- 在新代码中,我们要求在 100 毫秒前进行海龟之间的转换。
- 通常使用更长的时间段,只是为了确保转换会到达。
- 停止演示,构建并运行:
ros2 launch turtle_tf2 start_debug_demo.launch.py
- 我们所做的最后一次修复并不是您真正想要做的,只是为了确保这是我们的问题。
- 真正的修复看起来像这样:
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
tf2::TimePointZero);
} catch (tf2::TransformException & ex) {- 或者像这样:
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
tf2::TimePoint());
} catch (tf2::TransformException & ex) {- 以在了解 tf2 和时间教程中了解有关超时的更多信息,并按如下方式使用它们:
try {
transformStamped = tf_buffer_->lookupTransform(
toFrameRel,
fromFrameRel,
this->now(),
rclcpp::Duration::from_seconds(0.05));
} catch (tf2::TransformException & ex) {- 修复后,在运行就不再提示错误
参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号