



















Turtlebot3-burger入门教程#noetic版#-创建地图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

Turtlebot3-burger入门教程#noetic版#-创建地图
说明
- 本教程主要介绍如何通过turtlebot3进行创建地图
相关设备
- TB3套件:采购地址
操作步骤
- [Remote PC] 启动roscore
$ roscore- [TurtleBot] 启动Burger
$ roslaunch turtlebot3_bringup turtlebot3_robot.launch- [Remote PC] 然后运行SLAM启动文件以及Rviz,默认的slam算法为
gampping
$ export TURTLEBOT3_MODEL=burger
# 默认使用gmapping算法
$ roslaunch turtlebot3_slam turtlebot3_slam.launch
# hector算法
$ roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=hector
# cartographer算法
$ roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=cartographer
# karto算法
$ roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=karto- [Remote PC] 启动键盘操作
$ export TURTLEBOT3_MODEL=burger
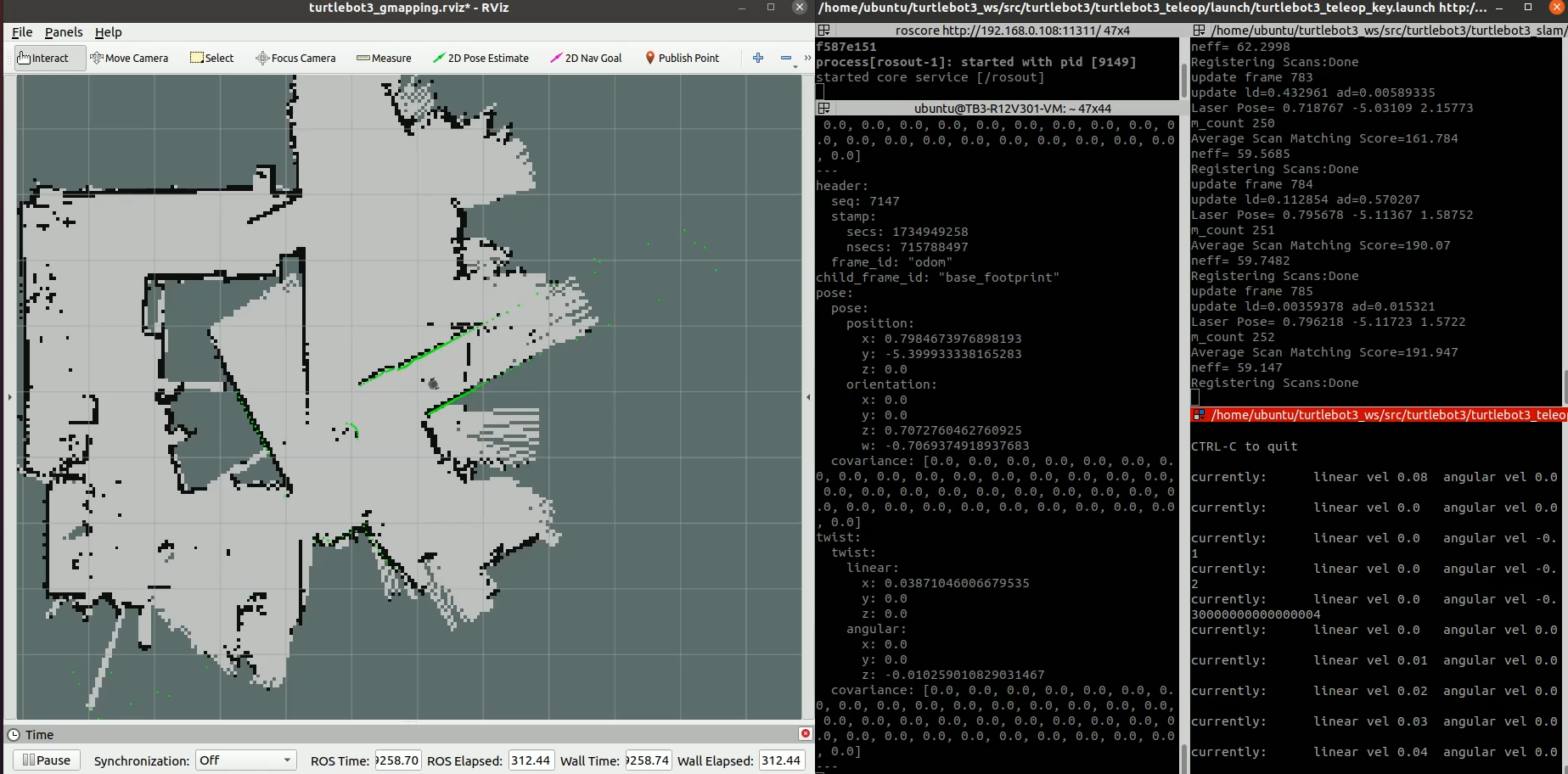
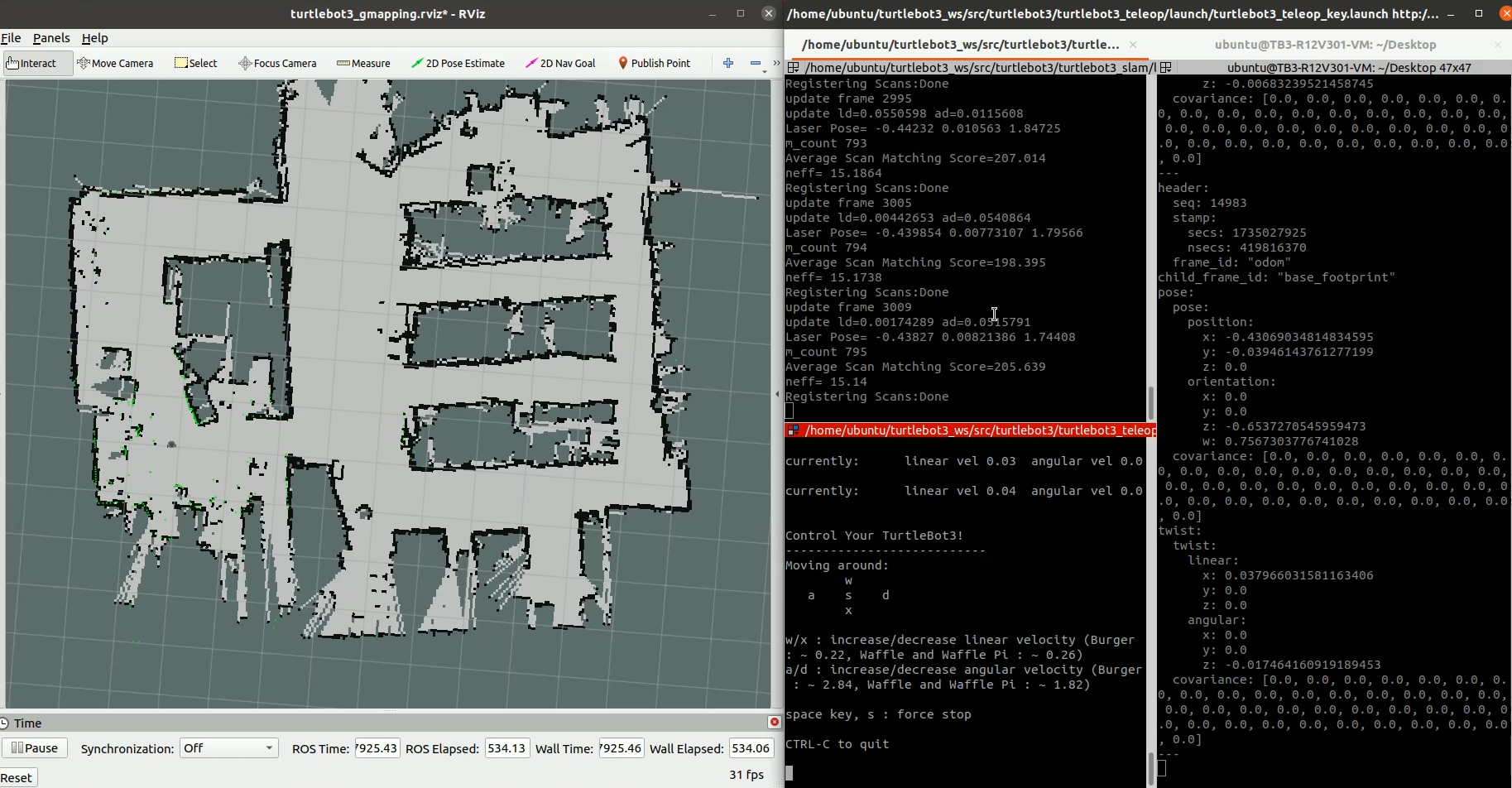
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch- 移动burger进行建图

- [Remote PC] 建图完成后保存地图
$ rosrun map_server map_saver -f ~/map- map.pgm和map.yaml 在 ~/ 目录里创建
FAQ
问题1:使用gmapping建图时,建图中途反复出现建图重叠错位
- 解决方法: 修改gmapping参数文件
turtlebot3/turtlebot3_slam/config/gmapping_params.yaml
# 更新gmapping到最新版本
$ sudo apt install ros-noetic-gmapping
# 修改对应参数
$ rosed turtlebot3_slam gmapping_params.yaml
## 用以下参数替换原来的参数项
map_update_interval: 5.0
maxUrange: 6.0
maxRange: 3.5
sigma: 0.05
kernelSize: 3
lstep: 0.05
astep: 0.05
iterations: 5
lsigma: 0.075
ogain: 3.0
lskip: 0
minimumScore: 50
srr: 0.01
srt: 0.02
str: 0.01
stt: 0.02
linearUpdate: 0.05
angularUpdate: 0.0456
temporalUpdate: -1.0
resampleThreshold: 0.5
particles: 30
xmin: -1.0
ymin: -1.0
xmax: 1.0
ymax: 1.0
delta: 0.05
llsamplerange: 0.01
llsamplestep: 0.01
lasamplerange: 0.005- 修改后建图
问题2:使用karto建图时,出现车走但rviz中车走一段又跳回原点的情况
- 使得建出来的地图在不停重叠
- 解决方法: 将
turtlebot3_ws/src/turtlebot3/turtlebot3_slam/config/karto_mapper_params.yaml中的use_scan_matching参数设置成false - 参考资料: https://blog.csdn.net/weixin_41349117/article/details/101019662
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=66706701&cid=115686517&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流