



















walking与Matlab入门教程-控制walking机器人移动

walking与Matlab入门教程-控制walking机器人移动
说明:
- 介绍如何在Matlab控制walking机器人移动
步骤:
- 新开终端,启动底盘
ros2 launch walking_bringup robot.launch.py-
打开Matlab软件
-
设置域ID为2
setenv("ROS_DOMAIN_ID","2");- 创建ROS2节点
ros2Node = ros2node( "/example_node" );- 查看话题,是否连接上walking
ros2 topic list
/active
/cmd_vel
/cmd_vel_mux/input/default
/cmd_vel_mux/input/joystick
/cmd_vel_mux/input/keyop
/cmd_vel_mux/input/navigation
/cmd_vel_mux/input/remote
/cmd_vel_mux/input/webapp
/dynamic_joint_states
/joint_states
/odom
/parameter_events
/robot_description
/robot_velocity
/rosout
/tf
/tf_static- 订阅里程计话题
handles.odomSub = ros2subscriber(ros2Node, "/odom" , "nav_msgs/Odometry" )- 接收里程计消息
odomMsg = receive(handles.odomSub);- 获取机器人的起始位置
poseStart = exampleHelperGet2DPose(odomMsg)
handles.poses = poseStart;- 创建发布者用于控制机器人速度
handles.velPub = ros2publisher(ros2Node, '/cmd_vel' , 'geometry_msgs/Twist' )
poses = exampleHelperROS2TurtleBotKeyboardControl(handles);-
弹出一个窗口,点击窗口
-
分别按 i 、k 、j 、l 、q 键进行控制机器人
- i 是向前移动
- k 是向后移动
- j 是向左移动
- l 是向右移动
- q 是退出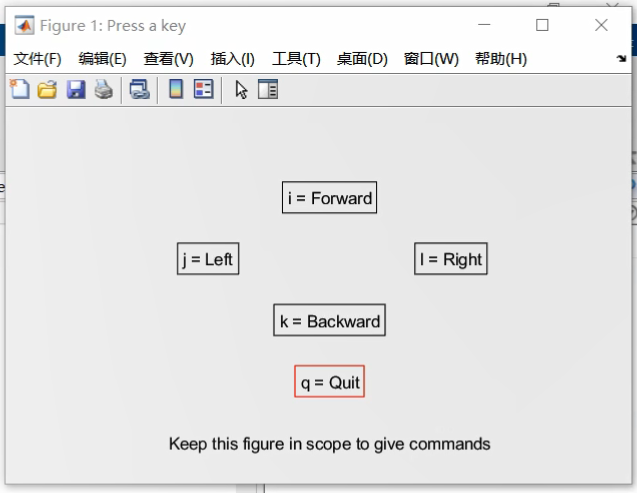
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=384210145&bvid=BV1RZ4y18721&cid=724714794&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>