



















walking与Matlab入门教程-从Simulink生成代码来创建ROS2节点

说明:
- 介绍如何从Simulink生成代码来创建ROS2节点
前提条件:
步骤:
- 启动新开终端,启动底盘
ros2 launch walking_bringup robot.launch.py-
打开Matlab软件
-
设置域ID为2
setenv("ROS_DOMAIN_ID","2")- 创建ROS2节点
ros2Node = ros2node("/example_node")- 打开ROS2配置的机器人反馈控制模型
open_system( "robotFeedbackControllerROS2" );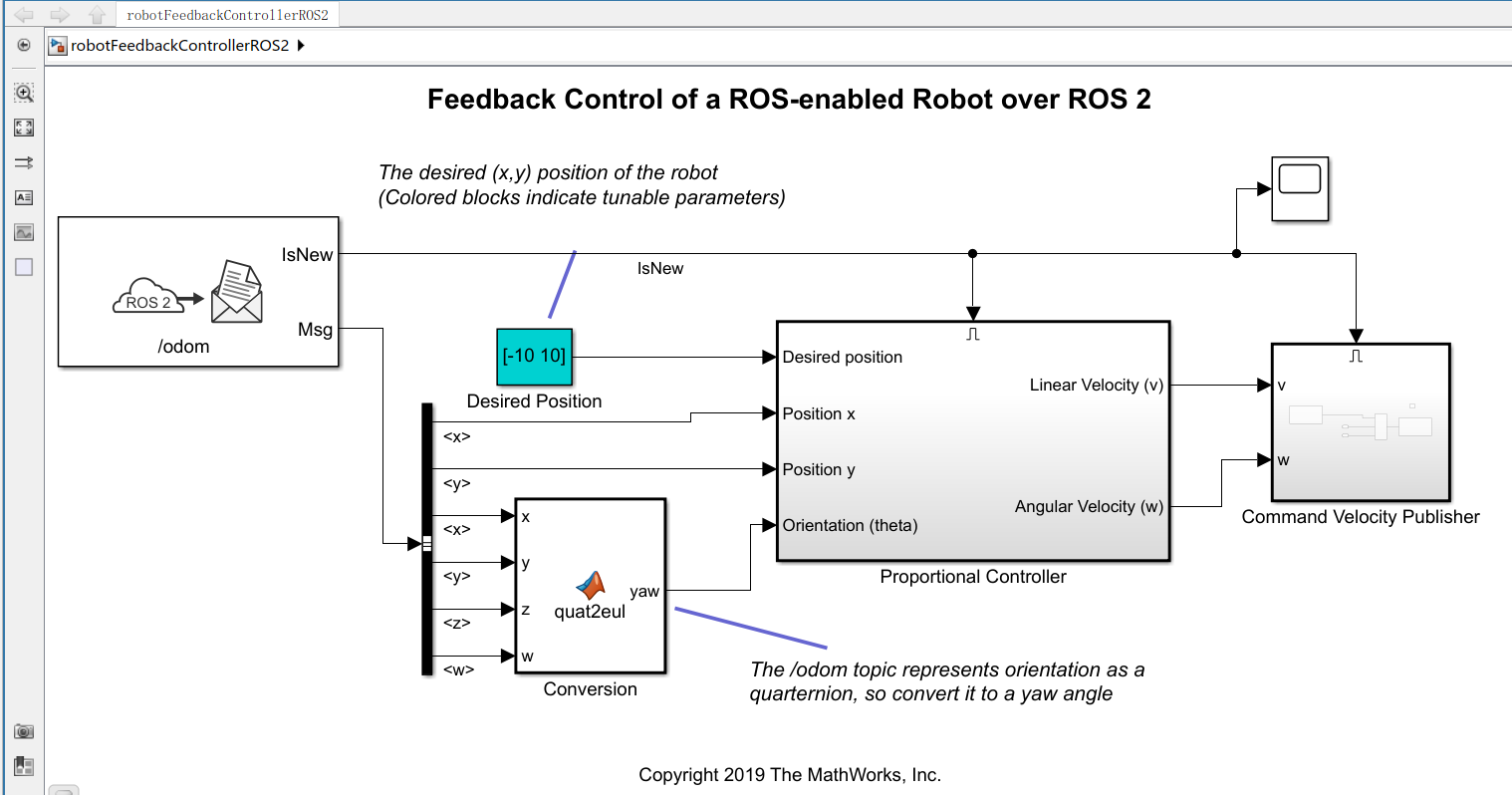
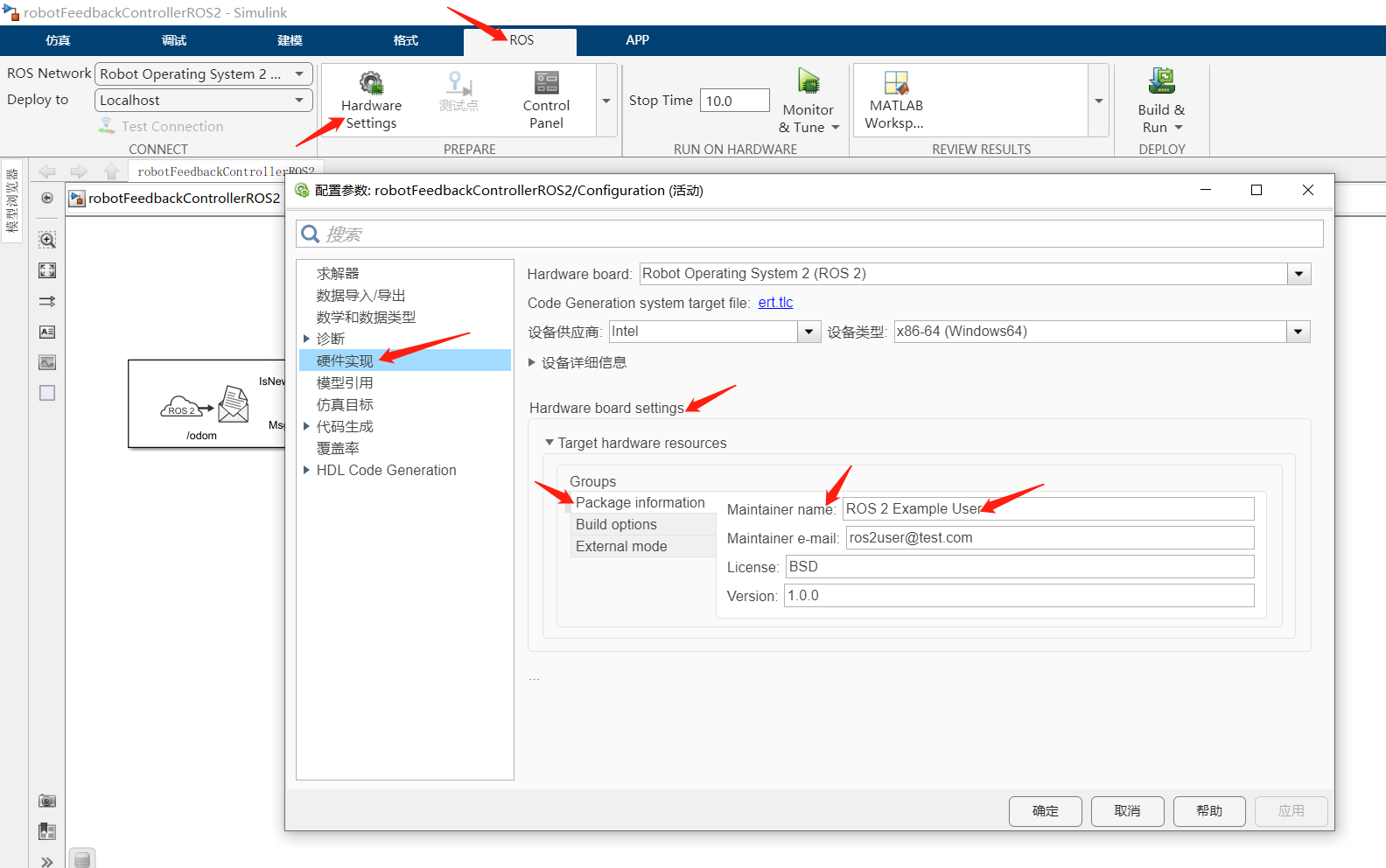
- 在ROS选项卡下,单击 硬件设置Hardware Settings。在硬件实现Hardware implementation窗格中,Hardware board settings部分包含特定于生成的 ROS 2 包的设置,例如要包含在package.xml文件中的信息。将维护者名称更改为ROS 2 Example User, 点击应用Apply
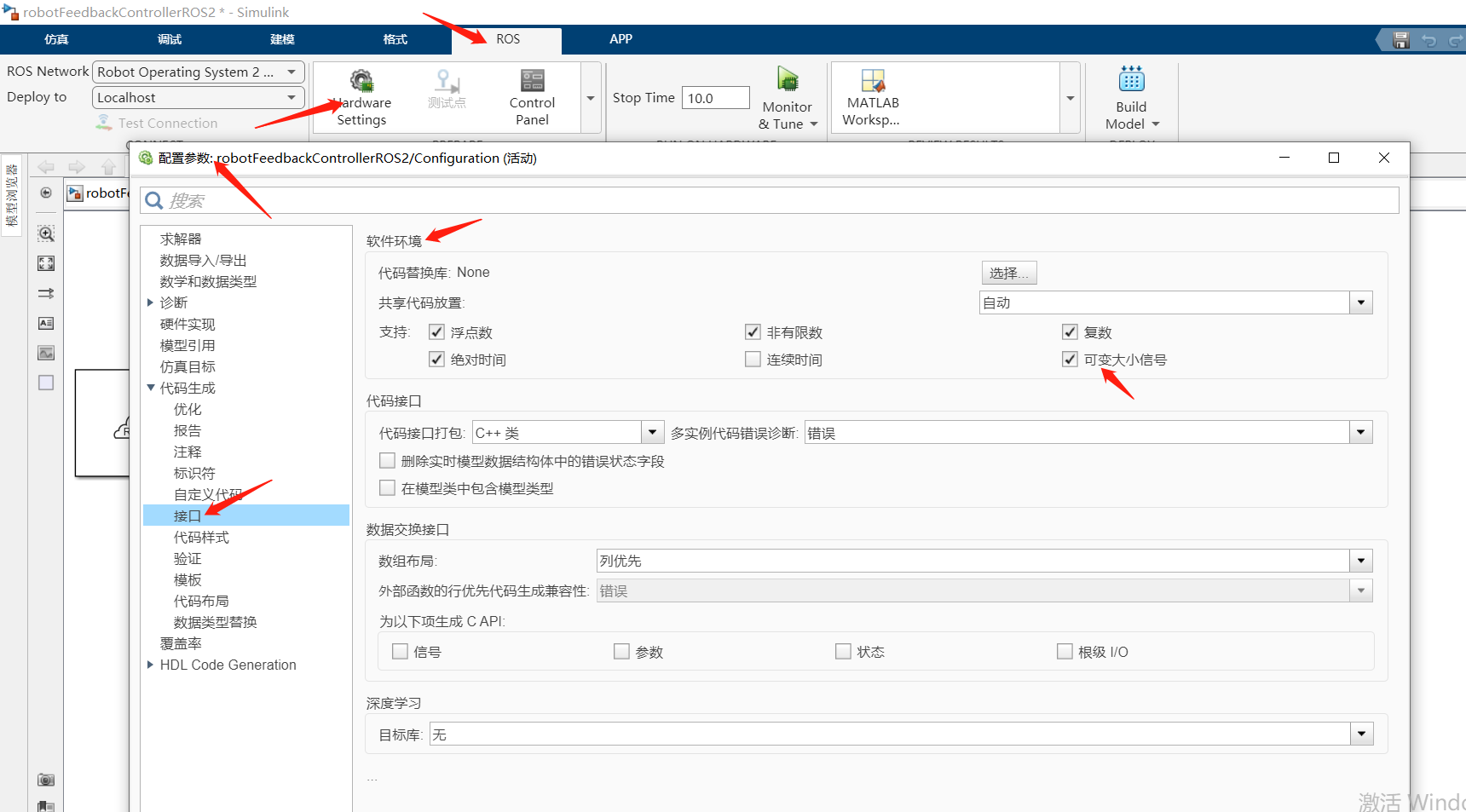
- 该模型需要可变大小的数组。要启用此选项,请检查代码生成Code Generation > 接口Interface > 软件环境Software environment下的 可变大小信号variable-size signals
- 在Solver求解器窗格中,确保求解器的类型Type设置为定步长Fixed-step,并将固定步长Fixed-step size设置为0.05,单击确定

- 在硬件实现Hardware Implementation选项卡的Target hardware resources下,单击Build options组。将构建操作Build options设置为Build

- 在Simulation选项卡仿真下的准备Prepare中,选择ROS Network,设置ROS 2 ROS_DOMAIN_ID网络的域ID (ROS 2),此示例使用域ID为2

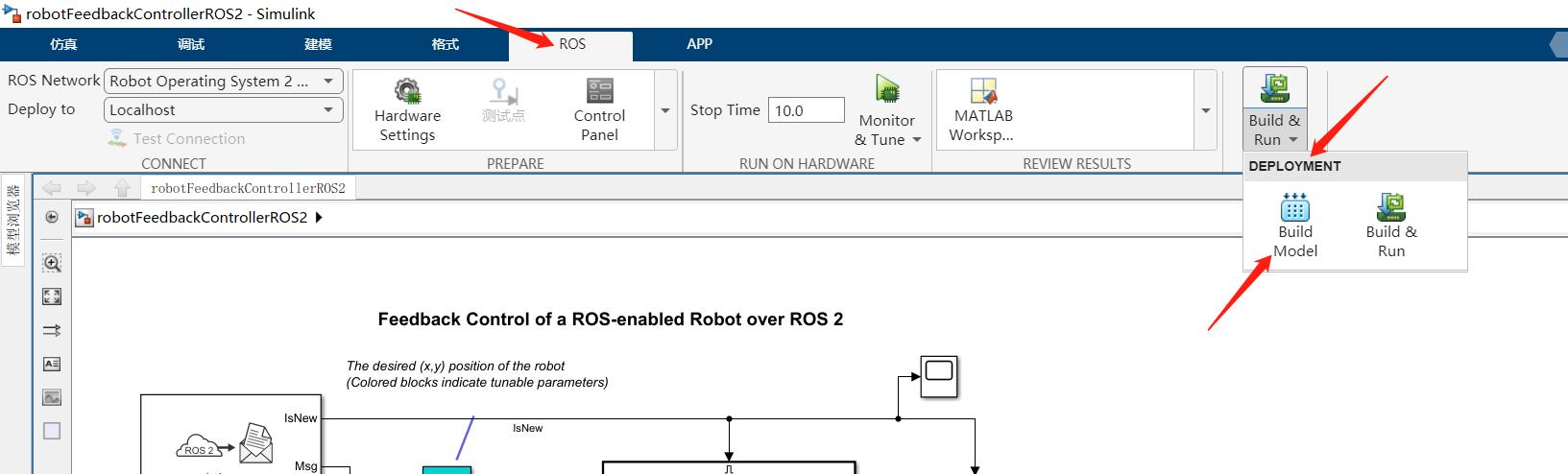
- 在ROS选项卡中,从DEPLOY部分中,单击Build Model。单击模型工具栏底部的查看诊断链接以查看构建过程的输出
- 构建完成后,src包含包源代码的文件夹:robotfeedbackcontrollerros2
- 新建终端,创建目录
mkdir -p ~/ros2_ws_simulink/src-
将生成的源码robotfeedbackcontrollerros2目录 拷贝到 ~/ros2_ws_simulink/src/里
-
编译
cd ~/ros2_ws_simulink
colcon build- 生成可执行文件robotFeedbackControllerROS2,并执行
cd ~/ros2_ws_simulink/install/robotfeedbackcontrollerros2/lib/robotfeedbackcontrollerros2
./robotFeedbackControllerROS2-
打开Matlab软件
-
查看所有正在运行的节点
ros2 node list
/robotFeedbackControllerROS2- 查看在walking中是否发布主题的数据/cmd_vel
ros2 topic list
/cmd_vel
/odom
/parameter_events
/rosout演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=811710053&bvid=BV1n34y1E71p&cid=724715287&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>