



















Windows系统入门教程-WSL2安装ROS1 Noetic (ubuntu20.04)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Windows系统入门教程-WSL2安装ROS1 Noetic (ubuntu20.04)
说明:
- 介绍如何在WSL2上安装ROS1 Noetic
- 环境: WSL2 ubuntu20.04
步骤:
- 进入WSL终端或桌面
- 通过Windows ternimal preview下拉选择Ubuntu进入WSL终端
- 或开始菜单点Ubuntu 20.04图标进入WSL终端
- 或进入WSL的xfce桌面,在打开终端
- 如果没安装,即安装RCM工具
rm online.sh ; wget https://gitee.com/ncnynl/commands/raw/master/online.sh ; sudo chmod +x ./online.sh; ./online.sh- 安装ROS1
cs -s install_ros1_noetic.sh- 输入y进行自动安装
测试:
- 新终端启动roscore
roscore- 效果图
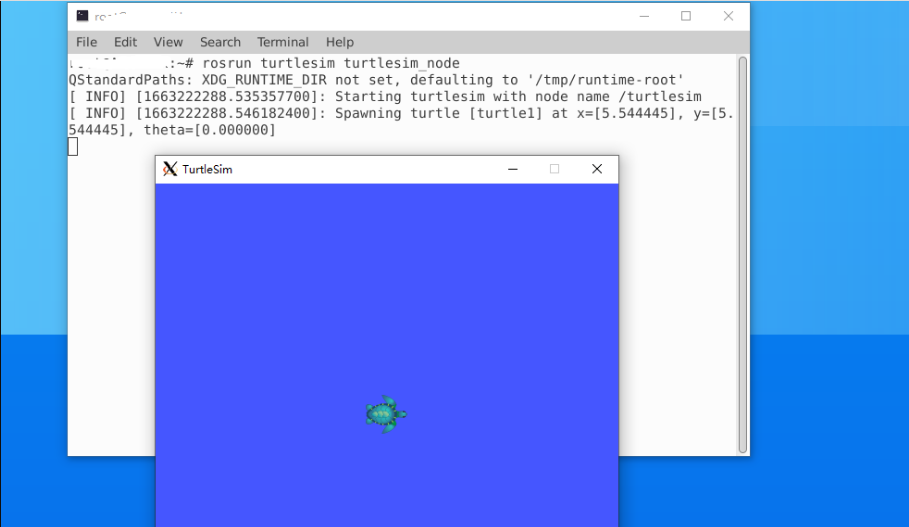
- 新终端启动turtlesim
rosrun turtlesim turtlesim_node- 效果图
- 新终端启动turtlesim
rosrun turtlesim turtle_teleop_key- 效果图

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号