



















小腾机械臂入门教程-摄像头调试和被抓取物体特征
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
-
介绍如何提取调试摄像头,提取被抓取物体特征
-
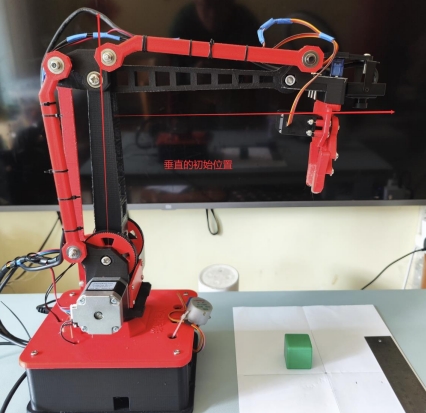
在机械臂的固定初始位置(两臂垂直),进行特征物体的提取,因为机械臂扫描物体的时候也是在这个位置,保持固定的位置,可以保证坐标定为精准,因为坐标定为会受到高度、光线、背景的影响。背景最好选取单色的背景,例如把一张白纸作为背景,或单色桌面的背景,这样物体的特征更加明显,在白纸的环境下,很容易找到特征物体,并确定坐标位置
步骤:
- 打开摄像头软件
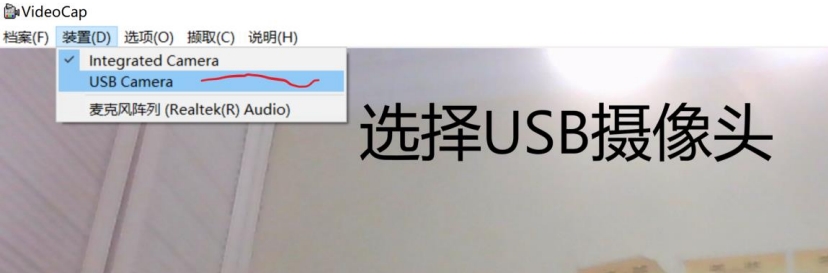
- 先 USB 连接到 PC 电脑上,确认连接好了 USB 摄像头,选择 USB Camera
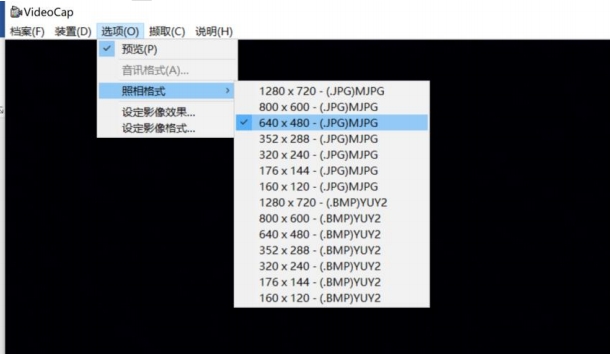
- 设置分辨率,选择分辨率为 640 * 480,暂不关闭。(最高可支持 1280*720, 暂时不设置这个,与程序有关系)
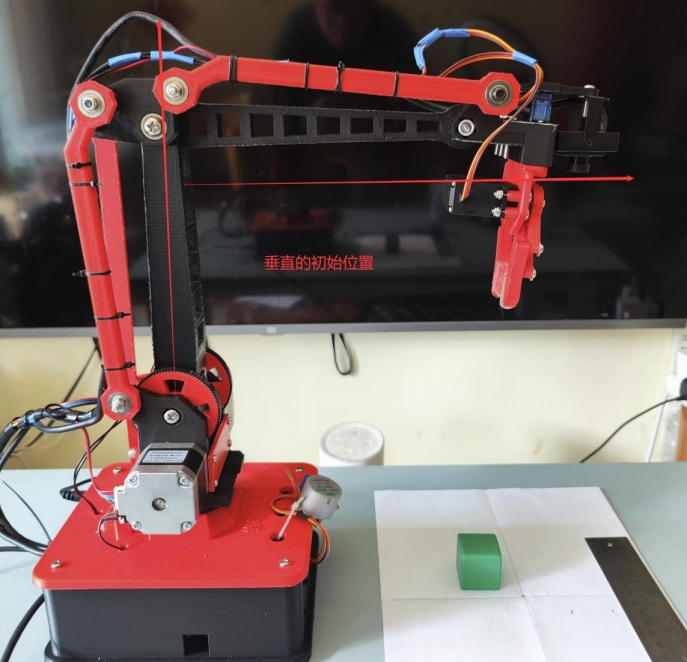
- 发送 G28 机械臂,让机械臂移动到初始的垂直位置,例如下图。不同夹爪的初始位置的 Y 坐标可能不一样,常见的 Y 坐标有 205、225、270、320,与夹爪长度有关系
- 保证摄像头的位置和方向安装正确,摄像头的字是朝前(可能跟以前案例相反,请更新示例代码,这样更符合习惯)

- 摄像头手动调焦(如果摄像头下物体不清楚的时候,才需要手动调焦)手动调焦的方法很简单,绿色方框有下有小螺丝,把它稍拧松,然后镜头就可以左右拧动了,通过微微的左右旋转,可以查看摄像头下的物体是否清晰(机械臂固定位置),如果物体变清晰了,手工调焦就完成了,把刚才的小螺丝轻轻的拧回去即可,注意不要太用力

- 接一来标记被抓取物体特征,如果要夹取的物体是个绿色的正方形(32X32 毫米),把绿色方块放到垂直位置的大概正下方,摄像头大约正下方即可
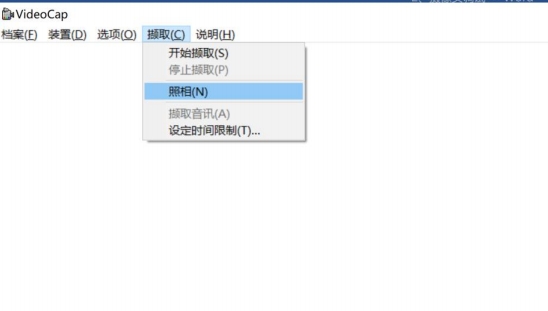
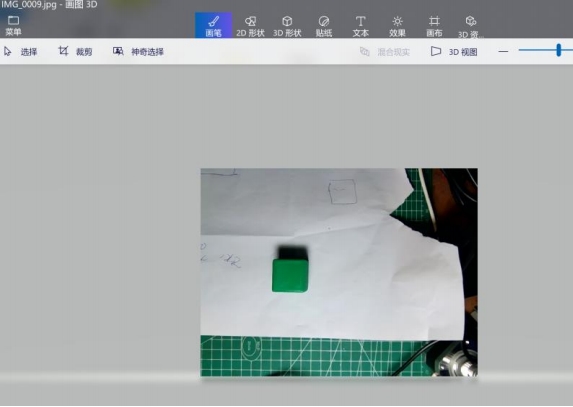
- 点击照相,采集一张相片,注意摄像头之前设置分辨率为 640 * 480
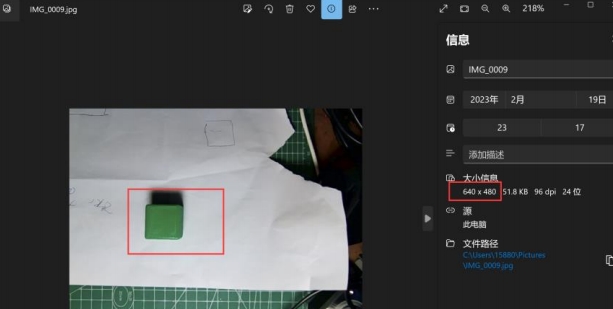
- 例如采集了的相片如下,分辨率是 640*480,默认保存在此电脑的图片目录下
- 接下来,提取被抓取物体的特征照片。把刚才拍摄的照片用 win10 自带软件画图 3D 打开,拍摄照片默认存在此电脑的图片目 录下
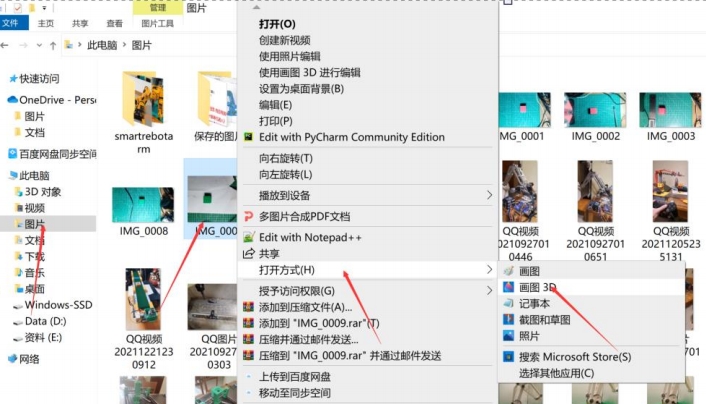
- 已打开,如下:
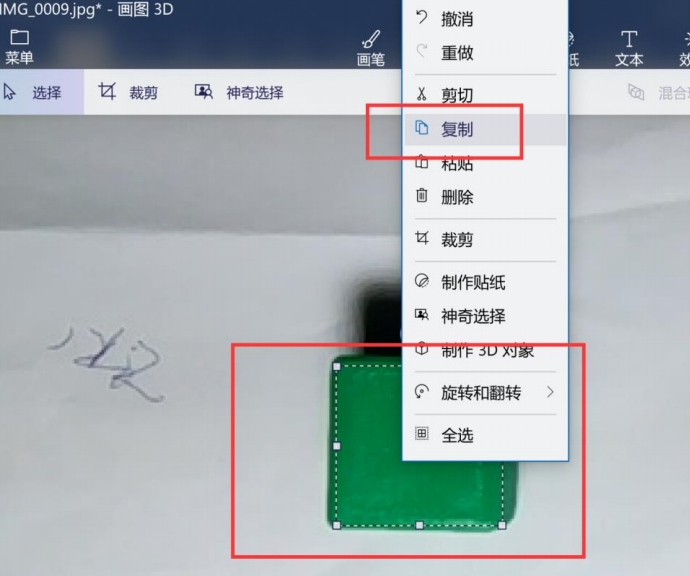
- 放大照片,按照方形边框选取物体,点击选择,提取特征物体照片。如果物体不是方形,也可以按照方形提取,但注意后续定位时的背景图片保持一致即可,只要背景一致,不需要一定按照物体的轮廓来提取。特征物体可以是带不同数字、颜色、图案等物体,通过特征物体的标定,后续可以做颜色识别、数字识别、物体识别等案例

- 然后右键,复制选取的图片
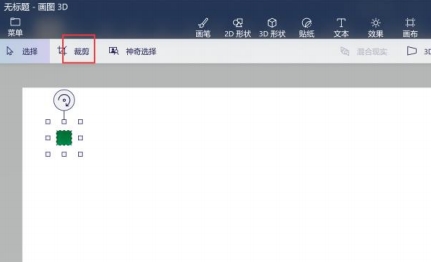
- 新建一个文件,粘贴到空白页
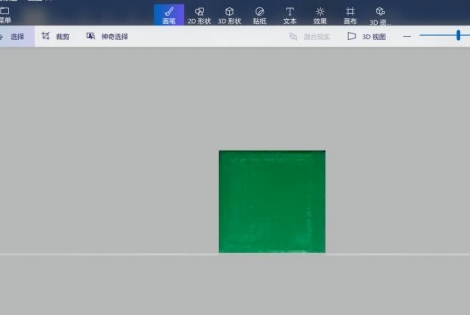
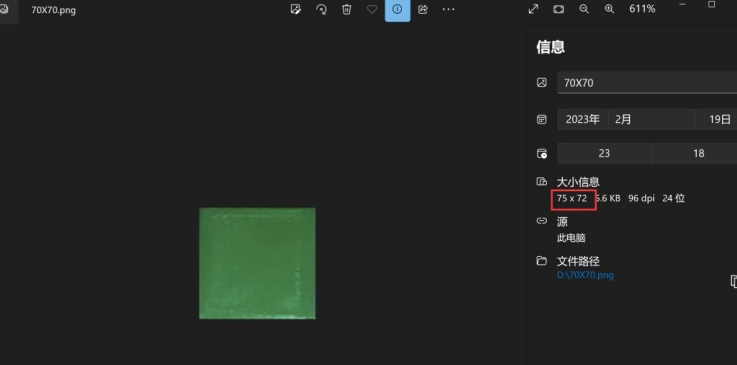
- 点击裁剪,保存复制的图片即可,例如名字为 70X70,这样被抓取物体的特征就完成了
- 查看图片的属性,图片的像素大致是 75X72,实际物体的大小是 32X32 毫米,75/32=2.3。比例大概是 1: 2.3,这里的比例表示 2.3 个像素对应 1 毫米,后续用这个数据来进行坐标位置换算,因此摄像头安装高度对坐标位置换算是有影响的(分辨率也会影响),V9版本的机械臂都是 180 高度的,一般这个比例换算都是 2.3,保持不变即可,这个比例数据很重要,先记住,后面 python 编程里会用到
- 采集完特征照片后,记得把摄像头软件关闭掉,因为软件占用了摄像头,会影响到后续的 Python 程序调用摄像头
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号