



















小腾机械臂入门教程-YAT上位机控制机械臂和Gcode 命令
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍YAT上位机如何控制机械臂,讲解Gcode命令
步骤:
- 命令页面切换
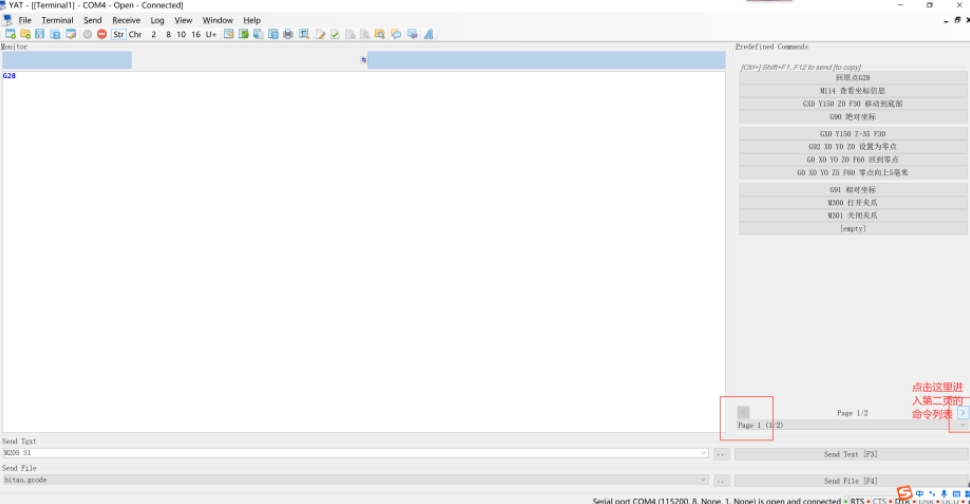
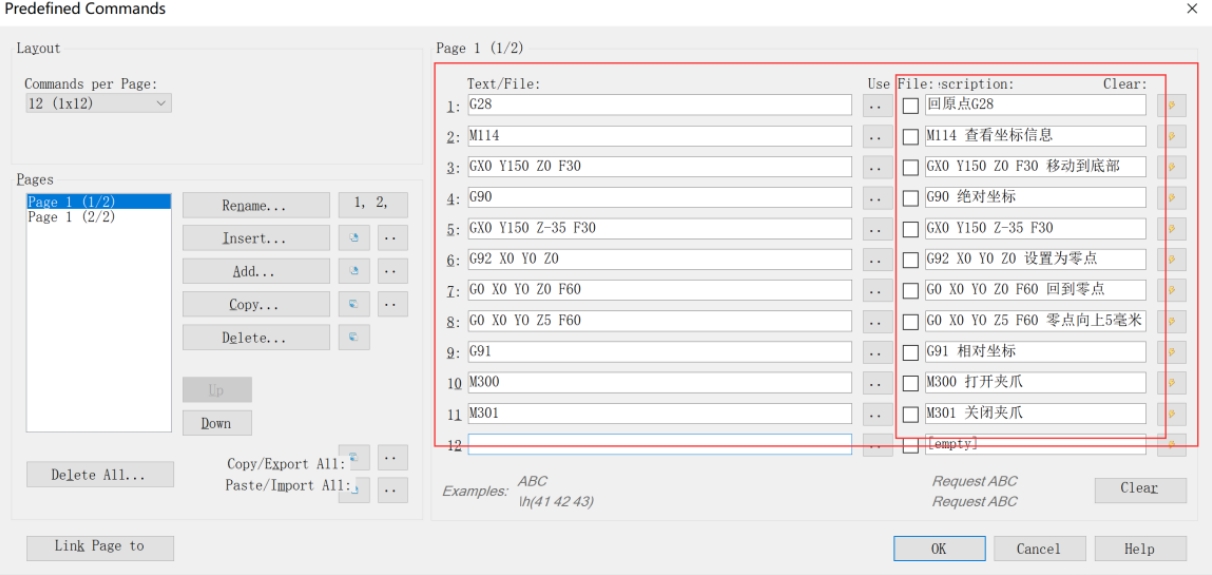
- 第一页的命令,先运行 G28 对机器进行初始化,然后点击 G90 绝对坐标,再运行其它命令。XYZ 是坐标值,F是移动速度。
- 第二页先点击 G91 相对坐标,然后再运行其它命令,表示增量控制。具体参数值可以自己调整。M300 和 M301 是步进电机夹爪,M3和M5 是舵机夹爪命令
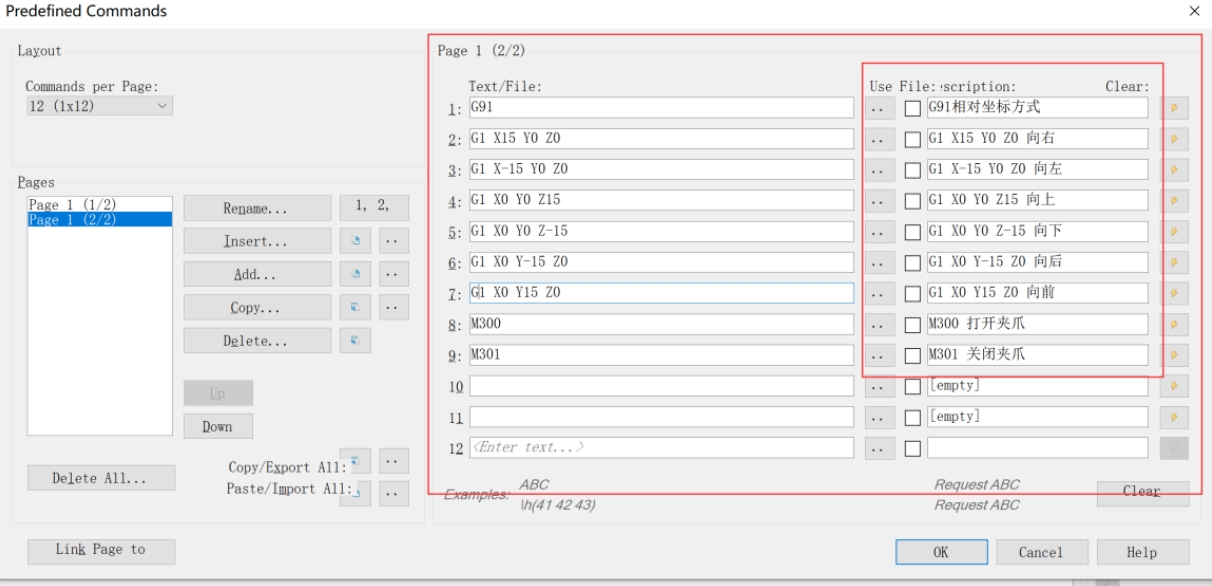
- 舵机是 M3 和 M5 命令
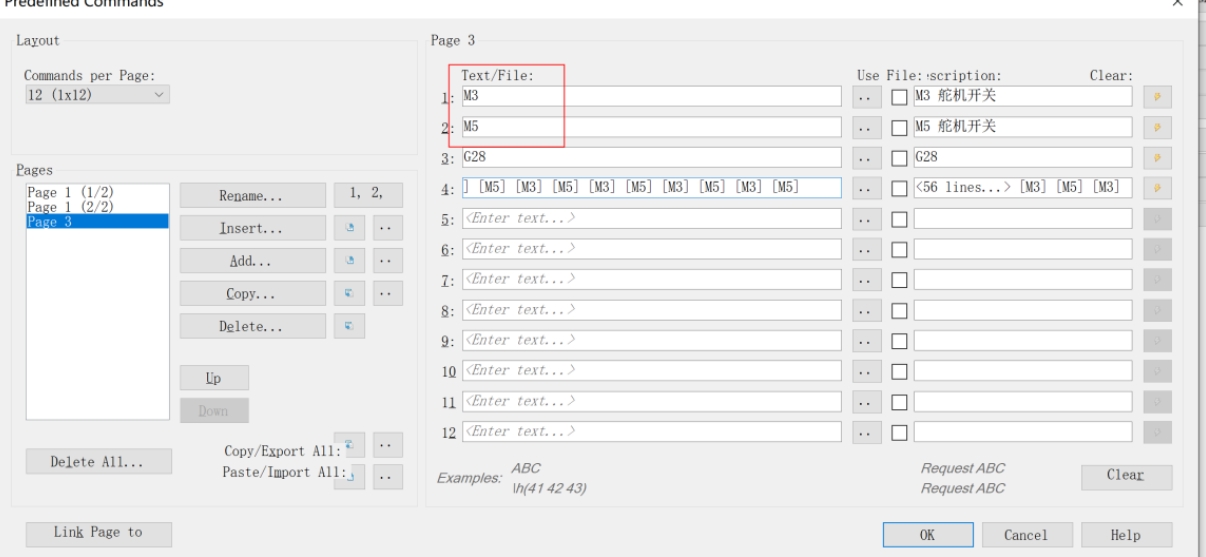
- 支持多行 GCODE 命令输入,点击这里的两个点点
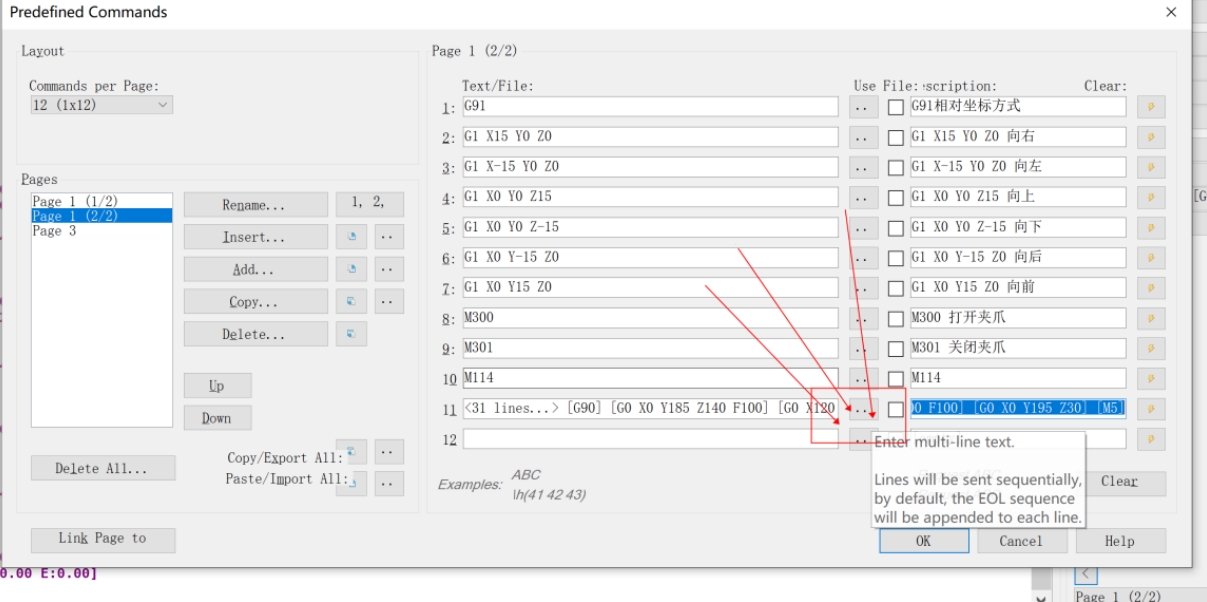
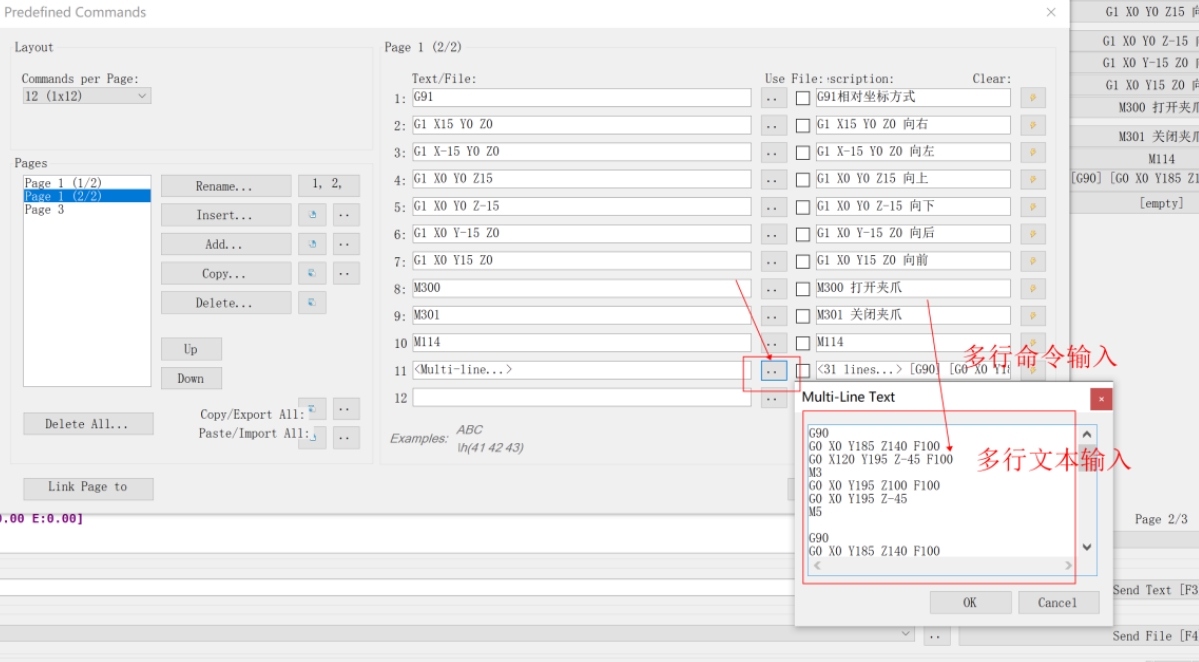
-
第四轴操作指令
-
M9 S10 :10 表示旋转的度数,范围 0-180 度。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号