



















小腾机械臂入门教程-硬件
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍小腾机械臂的硬件组成
详细介绍
-
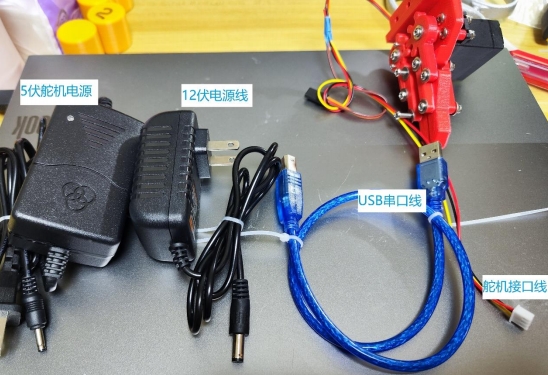
5V舵机电源
-
12V电源线
-
USB串口线
-
PS2手柄
-
上位机
-
机械臂
-
硬件线接口
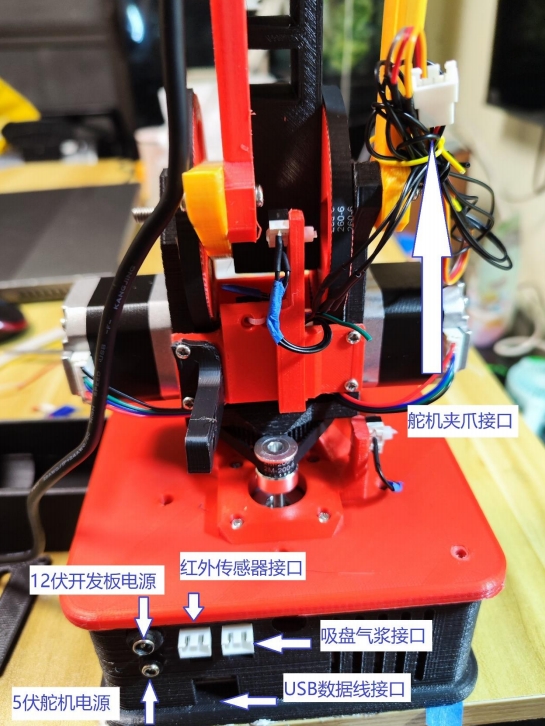
- 机械臂两个电源线,至少两个接口线,看爪子类型,舵机夹爪或者吸盘套件
-
完成上面电源和接口线连接,就可以操作 PS2 手柄。如果只想使用 PS2 手柄,可以不连接 USB 线。
-
如果要操作上位机,需要连接 USB 线。USB 线是小歪机械臂与 PC 电脑上位机通过串口通讯,刷新固件,想修改机械臂代码的话,也需要使用 USB 线。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号