



















小腾机械臂入门教程-视觉编程原理
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍视觉编程原理
介绍:
- 小腾机械的手眼标定(眼睛在手上)与程序控制
-
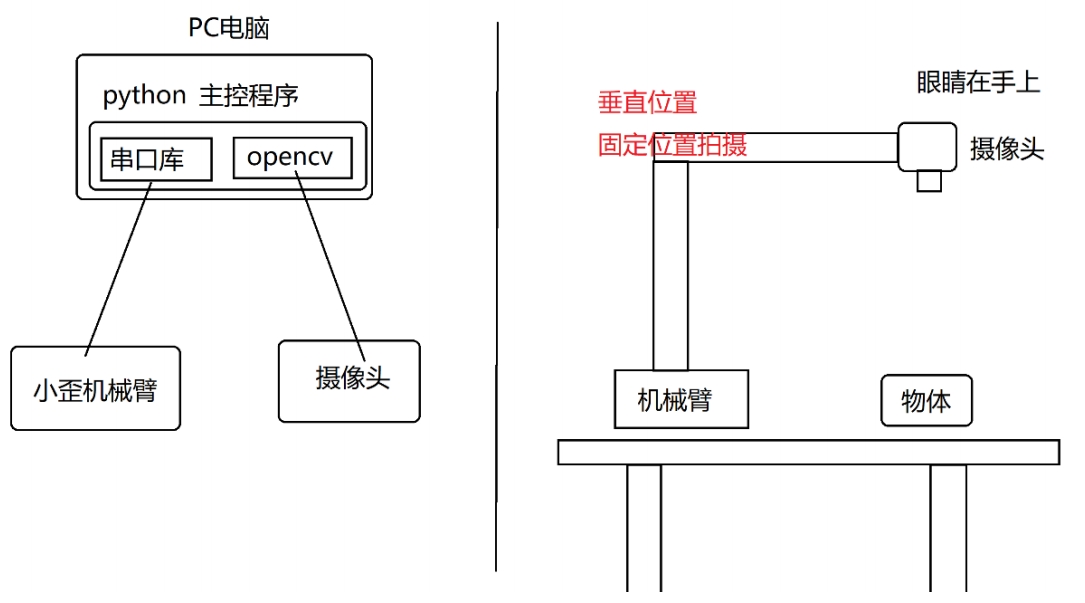
PC 电脑是主控中心,摄像头和机械臂都是属于外设,通过 python 的视觉库,找到物体并确定位置,然后通过 python 的串口库发送坐标位置命令给机械臂执行
-
摄像头有两种安装方式,一种是安装在机械臂末端,另外一种是安装固定的支架上,这里介绍的是安装在机械臂末端上,因为这种对用户相对比较好处理
-
安装在机械臂末端的摄像头,进行拍照定位时,必须回到指定位置,例如回到两臂垂直的交叉位置。为什么要回到指定位置呢?因为视觉定位会受到拍摄高度、背景、光线强度的影响,高度会影响像素与实际物体大小的比例,例如 640*480 相同像素的图片,拍摄的高度越高,物体越小,像素会越小,从 4 个像素对应 1 毫米,可能变成了 2 个像素对应 1 毫米
-
被查找的物体,进行特征提取时,也是回到上面说的指定位置,因为机械臂是在那个位置寻找物体的,进行坐标定位,因此提取特征时也应该在那个位置,这样物体大小保持不变,背景相同,光线也基本相同。另外注意物体的姿态也要放好,不同姿态也会影响定位,因为提取物体特征是按照方形截取的,如果姿态发生了旋转,可能提取的特征就不一样了
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号