



















ROS与Arduino-Arduino IDE 安装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Arduino IDE 安装
说明
- 这个教程展示如何安装arduino IDE和使用rosserial
- Arduino和Arduino IDE是进行硬件开发的非常好的辅助工具
- rosserial_arduino包可让ROS和ArduinoIDE一起工作
- rosserial提供的ROS通讯协议工作在Arduino的UART上,它让Arduino成为标准的ROS节点,可以发布和订阅ROS消息,发布TF转换,获取ROS系统时间。
Ubuntu下的Arduino IDE安装
- 安装Arduino
$ sudo apt-get install arduino- 启动arduino并进行相关设置, 完成后增加sketchbook/libraries目录等
$ arduinoUbuntu下rosserial arduino软件安装
- 二进制方式安装在ROS工作站(推荐)
sudo apt-get install ros-indigo-rosserial-arduino
sudo apt-get install ros-indigo-rosserial
rospack profile- 源码方式安装在ROS工作站
cd <ws>/src
git clone https://github.com/ros-drivers/rosserial.git
cd <ws>
catkin_makews为ROS的工作空间,克隆代码并编译,生成rosserial_msgs用于通讯,生成的ros_lib库放在
- 安装ros_lib到Arduino IDE开发环境
-
上面的安装会得到ros_lib,它需要复制到Arduino的开发环境,以启用Arduino与ROS通讯。
-
linux系统下,生成ros_lib到Linux下的Arduino库目录sketchbook/libraries(一般在用户的根目录下)
cd <sketchbook>/libraries
rm -rf ros_lib #如之前有,可以先删除
rosrun rosserial_arduino make_libraries.py .- windows系统下,先生成ros_lib到linux下的空目录.
- 生成后在复制到windows系统的Arduino库目录sketchbook/libraries(一般在我的文档里)
mkdir -p <some_empty_directory>
cd <some_empty_directory>
rosrun rosserial_arduino make_libraries.py .- 注意:rosrun 命令最后一个"." 代表在当前目录下生成。
- 检查ros_lib是否安装成功
- 重启Arduino IDE,查看File->Examples->ros_lib
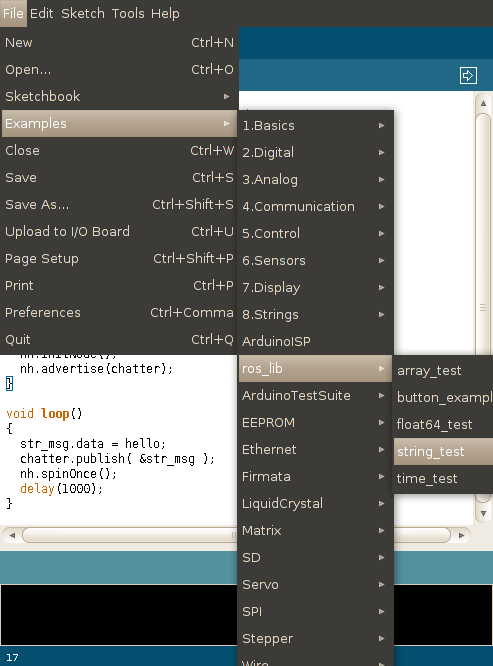
- 查看ros_lib里面的例子
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号