



















ROS与Arduino-Servo Controller (伺服控制器)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Servo Controller (伺服控制器)
说明
- 展示通过ROS使用Arduino和serial控制R/C 伺服
- 这可以用来实现控制一个释放机制,一个廉价的机器人手臂,一个ROS驱动的双足机器人,任何地方,你需要的廉价的致动器
- 这里代码提供一个简单示例控制hobby伺服器
硬件
- arduino
- hobby r/c servo
- 包含一个齿轮箱和电机控制电子
- 非常便宜
- 通过发送1-2毫秒宽度每20毫秒方波脉冲控制
- 通常移动伺服臂0-180度
- 有多种尺寸、扭矩和角精度
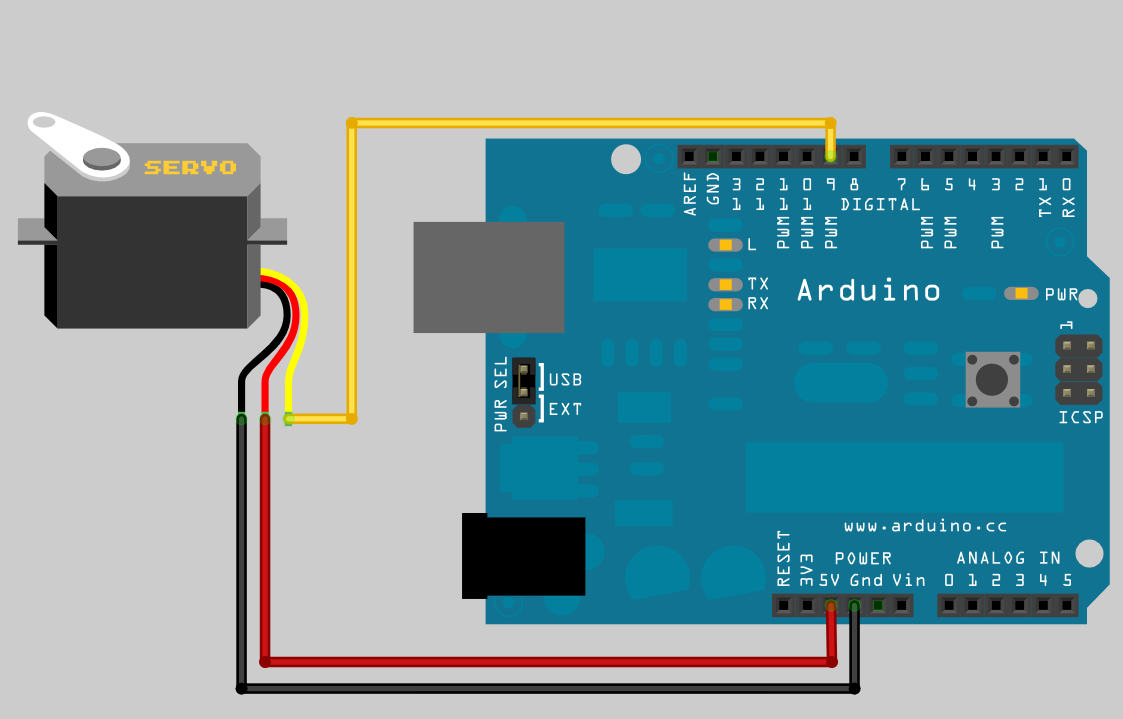
连接图
代码
/*
* rosserial Servo Control Example
*
* This sketch demonstrates the control of hobby R/C servos
* using ROS and the arduiono
*
* For the full tutorial write up, visit
* www.ros.org/wiki/rosserial_arduino_demos
*
* For more information on the Arduino Servo Library
* Checkout :
* http://www.arduino.cc/en/Reference/Servo
*/
#if defined(ARDUINO) && ARDUINO >= 100
#include "Arduino.h"
#else
#include <WProgram.h>
#endif
#include <Servo.h>
#include <ros.h>
#include <std_msgs/UInt16.h>
ros::NodeHandle nh;
Servo servo;
void servo_cb( const std_msgs::UInt16& cmd_msg){
servo.write(cmd_msg.data); //set servo angle, should be from 0-180
digitalWrite(13, HIGH-digitalRead(13)); //toggle led
}
ros::Subscriber<std_msgs::UInt16> sub("servo", servo_cb);
void setup(){
pinMode(13, OUTPUT);
nh.initNode();
nh.subscribe(sub);
servo.attach(9); //attach it to pin 9
}
void loop(){
nh.spinOnce();
delay(1);
}解释:
- 本代码使用一个Arduino Servo库,它处理所有的低电平控制,以产生和维护伺服脉冲。
- 你所有的代码需要做的是指定引脚的伺服连接,然后写入到伺服对象的角度。
- 伺服库使用Arduino的内置定时器中断来产生正确的脉冲。
- 在这个例子中,我们只能控制一个伺服,但相同的库可以用来控制多达12个伺服系统在大多数Arduino板和48对arduino mega。
- 关键地方是,增加全局Servo对象,连接到正确的Arduino引脚,在每个伺服订阅主题,调用回调函数,写入一个新的角度到Servo对象。
测试
- 新终端打开
$ roscore- 新终端打开
$ rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0- 新终端打开,发送servo主题,角度在 0-180 之间。
$ rostopic pub servo std_msgs/UInt16 <angle>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号