



















Turbot-VSLAM入门教程-实现RTAB-MAP建图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
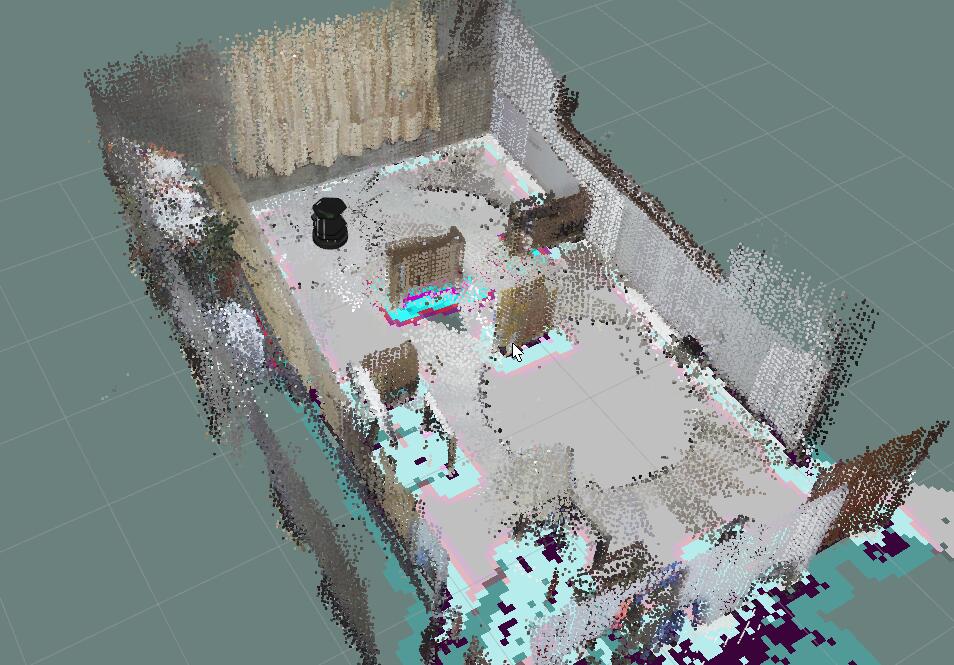
- 介绍如何利用Turbot系列小车实现rtabmap建图
- 测试环境:Ubuntu 16.04 + ROS Kinetic + Turbot-SLAM + Kinect v1
前期准备
- [Turbot && Remote PC] 安装rtabmap算法
$ sudo apt-get install ros-kinetic-rtabmap-ros操作步骤
- [Turbot] 启动底盘
$ roslaunch turbot_bringup minimal.launch- [Turbot] 启动rtabmap
$ roslaunch turbot_vslam rtabmap.launch
or
// 该命令为删除之前的地图数据,再重新开始生成地图
$ roslaunch turbot_vslam rtabmap.launch args:="--delete_db_on_start"- [Remote PC] 启动rviz
$ roslaunch turbot_rviz rtabmap_rviz.launch- [Remote PC] 启动键盘控制
$ roslaunch turbot_teleop keyboard.launch- 四周走动进行建图
- [Turbot] 地图自动保存在
~/.ros目录下
$ ls ~/.ros -lh | grep rtabmap
-rw-r--r-- 1 ubuntu ubuntu 200M Jan 3 15:50 rtabmap.db演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=68355702&cid=118474186&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号