



















Ailibot模型入门教程-solidworks中设置右手定则坐标系视图模版
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
文章说明
- 本教程主要说明如何在solidworks2018中设置右手定则坐标系视图模版
- 本教程所提及的零部件模版和装配体模版已上传上gitee | 获取地址
操作步骤
- 由于本系列教程所设计的小车都是用ROS环境下,所以设计模型时最好也遵循ROS中用的右手定则坐标系
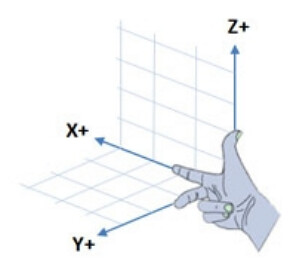
- 同时的solidworks的默认模版的坐标系视图是与ROS中用到的不一致,用起来不方便,所以需要设置一个与ROS中用的右手定则坐标系一致的视图模版
-
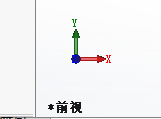
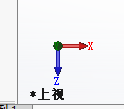
此处需要将前视图改为的x轴向前视角,上视图改为z轴朝下的视角,右视图改为y轴朝左的视角
-
首先打开默认模版
-
然后按
空格键调出视图定向界面,然后选择下视图,然后右键菜单中选择将其设置为前视图 -
再按
空格键调出视图定向界面,然后选择右视图,然后右键菜单中选择将其设置为前视图 -
再按
空格键调出视图定向界面,然后选择前视图,然后右键菜单中选择将其设置为后视图 -
修改完后,就可以得出一个方便我们设计的模型的视图

-
最后另存为视图模版
-
装配体的视图模版制作流程也一样,在进行零部件装配前,也需要设置一样这样的装配体模版
-
具体的设置流程可以参阅下面视频教程
演示视频
- 网站视频如果看不清,可以点视频到哔哩哔哩查看高清版本
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号