



















Ailibot模型入门教程-ros环境下使用导出的URDF包
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
文章说明
- 本教程主要介绍如何在ros环境下使用导出的URDF包
- 本教程所提及的仿真ROS包已上传到gitee | 获取地址
- 测试环境:Ubuntu 20.04 + ROS Noetic
操作步骤
-
在上一篇教程的结尾,solidworks的sw2urdf插件会导出一个ROS包
-
创建
ros1_ailibot_model_ws工作空间,将ROS包复制到工作空间中 -
使用rcm部署代码
-
1.安装rcm
curl https://www.ncnynl.com/rcm.sh | bash --
- 部署代码
cs -s install_ros1_ailibot_model_solidworks- 因为d435i模型需要使用专用的realsense_ros_gazebo插件,也要一起下载编译
- rviz上查看模型
$ source ~/ros1_ailibot_model_ws/devel/setup.bash
$ roslaunch ailibot_model display.launch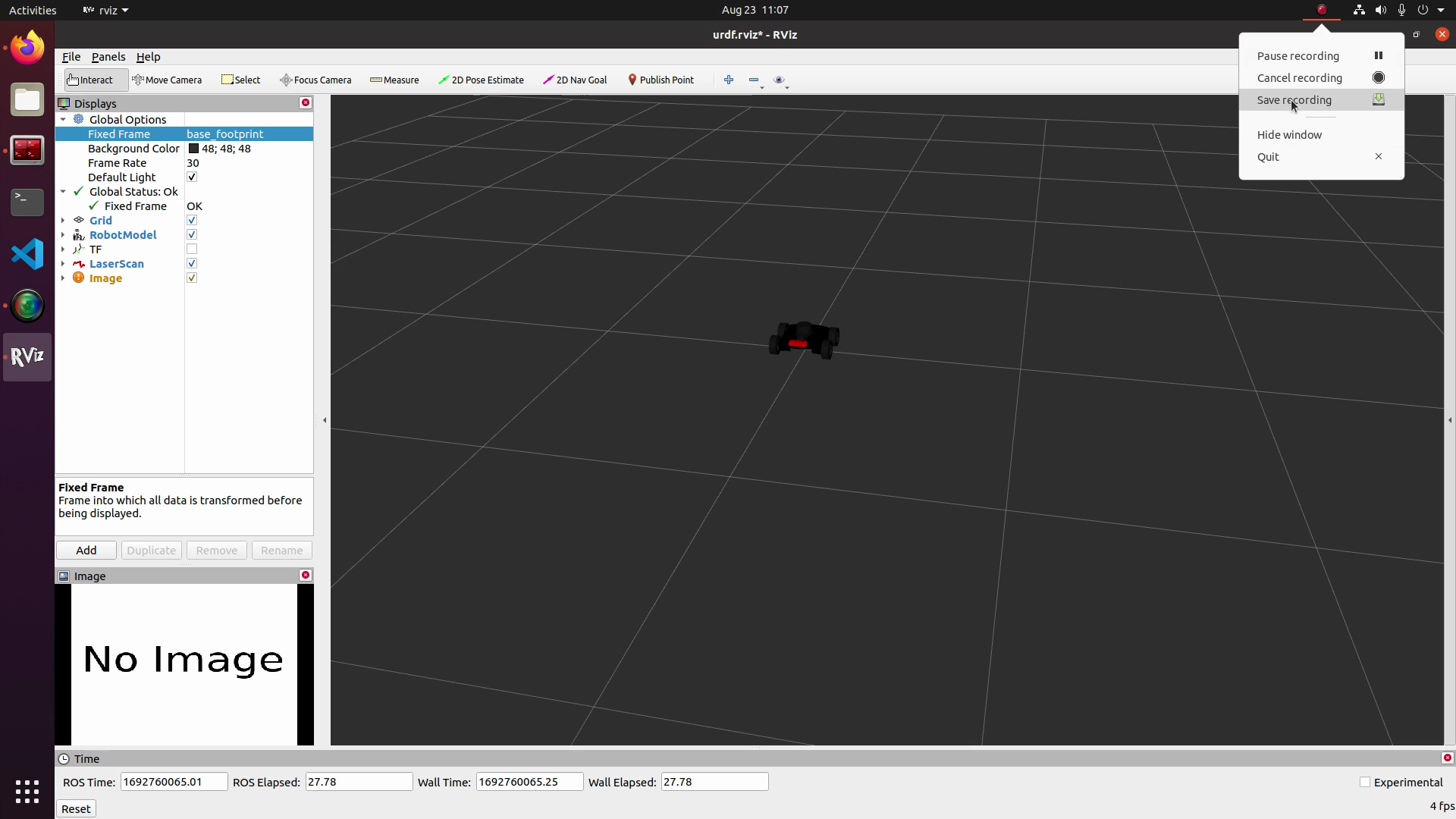
演示视频
- 网站视频如果看不清,可以点视频到哔哩哔哩查看高清版本
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号