



















ROS2与Lighthouse定位系统-测试单台无人机起飞和降落
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何通过crazyswarm测试单台无人机起飞和降落
- 通过单无人机执行helloworld程序来测试集群是否安装正常
- 本测试基于无人机集群主机配置,如果是自己配置,请参考官方文档
- Crazyflie无人机集群套件,采购地址
仿真飞行
- 在真机测试之前,我们先做以下仿真
- 进入目录
cd scripts_ros- scripts_ros是一个软连接,对应到crazyswarm2/crazyflie_examples/crazyflie_examples目录
- 仿真运行,启动launch文件,并指定为仿真
ubuntu@Crazeflie-NUC:~/scripts_ros2$ ros2 launch crazyflie launch.py backend:=sim
[INFO] [launch]: All log files can be found below /home/ubuntu/.ros/log/2024-04-03-11-35-24-423922-Crazeflie-NUC-21702
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [crazyflie_server-3]: process started with pid [21708]
[INFO] [teleop-1]: process started with pid [21704]
[INFO] [joy_node-2]: process started with pid [21706]
[INFO] [gui.py-4]: process started with pid [21710]
[teleop-1] [INFO] [1712115325.375741980] [teleop]: Mode changed to cmd_vel_world- 之后后,会弹出一个nicegui页面,效果如图:
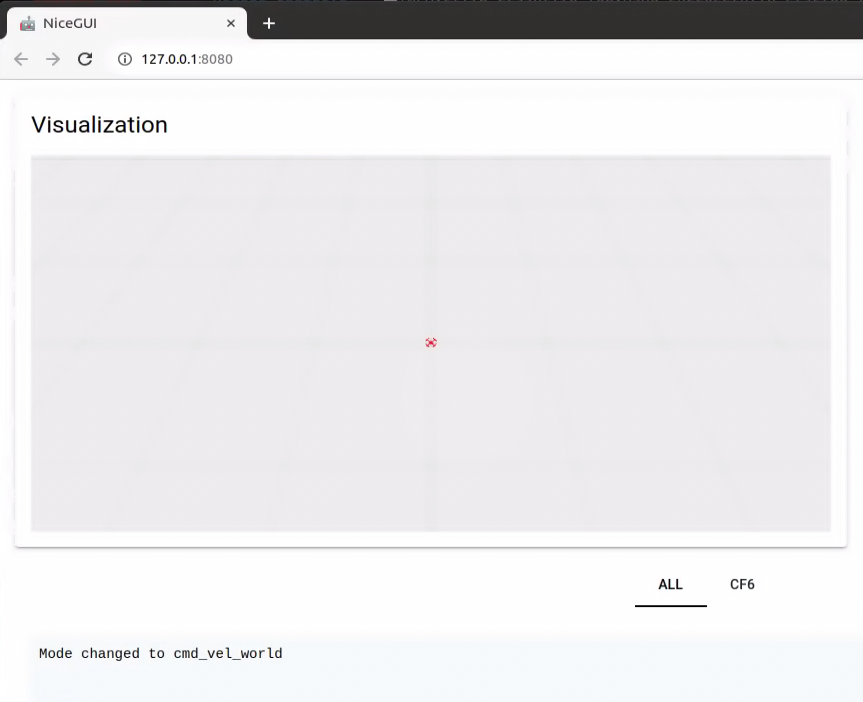
- 执行hello_world命令
ros2 run crazyflie_examples hello_world --ros-args -p use_sim_time:=True- 过几秒,在nicegui页面无人机开始缓慢上升,停留几秒,再缓慢降落
真机测试
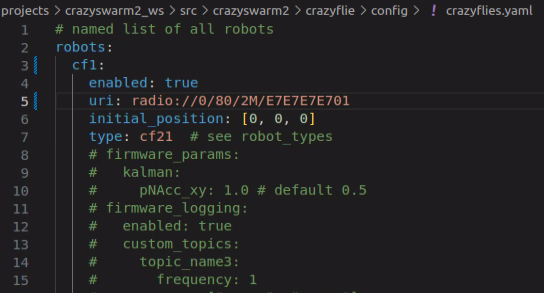
- 1号无人机放置在基站测试区域中心
- 同时配置好crazyflies.yaml为1号无人机
- 效果图:
- 终端下启动launch文件
ros2 launch crazyflie launch.py- 新终端,执行hello_world命令
ros2 run crazyflie_examples hello_world- 无人机开始缓慢起飞,悬停一会,再缓慢降落,效果和仿真一致
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号