



















ROS与SLAM入门教程-多线激光雷达(rs-lidar-16)hector构建地图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与SLAM入门教程-多线激光雷达(rs-lidar-16)hector构建地图
说明:
- 介绍如何通过多线雷达来实现hector算法建图
- 测试平台:turbot-DL + 多线雷达rslidar-16
准备:
-
设置rs-lidar-16雷达,请参考:https://www.ncnynl.com/archives/201807/2552.html
-
配置激光雷达3D点云数据转换为2D激光数据,参考:https://www.ncnynl.com/archives/201807/2554.html
-
安装hector:
sudo apt-get install ros-kinetic-hector-slam- 新建turtlebot_hector_2d.launch
roscd roscd pointcloud_to_laserscan/luanch
vim turtlebot_hector_2d.launch- 内容如下:
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="scan_topic" value="scan" />
<param name="base_frame" value="base_footprint" />
<param name="odom_frame" value="odom" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="800"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.15" />
<param name="laser_max_dist" value="5.8" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!--<param name="tf_map_scanmatch_transform_frame_name" value="scanmatcher_frame" />-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
</node>
</launch>- 新建turtlebot_rslidar.launch
roscd pointcloud_to_laserscan/luanch
vim turtlebot_rslidar.launch- 内容如下:
<?xml version="1.0"?>
<launch>
<!-- run pointcloud_to_laserscan node -->
<node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan">
<remap from="cloud_in" to="/rslidar_points"/>
<remap from="scan" to="/scan"/>
<rosparam>
# target_frame: rslidar # Leave disabled to output scan in pointcloud frame
transform_tolerance: 0.01
min_height: -0.4
max_height: 1.0
angle_min: -3.1415926 # -M_PI
angle_max: 3.1415926 # M_PI
angle_increment: 0.003 # 0.17degree
scan_time: 0.1
range_min: 0.2
range_max: 100
use_inf: true
inf_epsilon: 1.0
# Concurrency level, affects number of pointclouds queued for processing and number of threads used
# 0 : Detect number of cores
# 1 : Single threaded
# 2->inf : Parallelism level
concurrency_level: 1
</rosparam>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.0 0.0 0.18 0 0.0 0.0 base_link laser 100"/>
</launch>测试:
- 主机,新终端,启动雷达
roslaunch rslidar_pointcloud rs_lidar_16.launch- 主机,新终端,启动点云转换
roslaunch pointcloud_to_laserscan turtlebot_rslidar.launch- 主机,新终端,启动建图:
roslaunch pointcloud_to_laserscan turtlebot_hector_2d.launch- 从机,新终端,启动键盘:
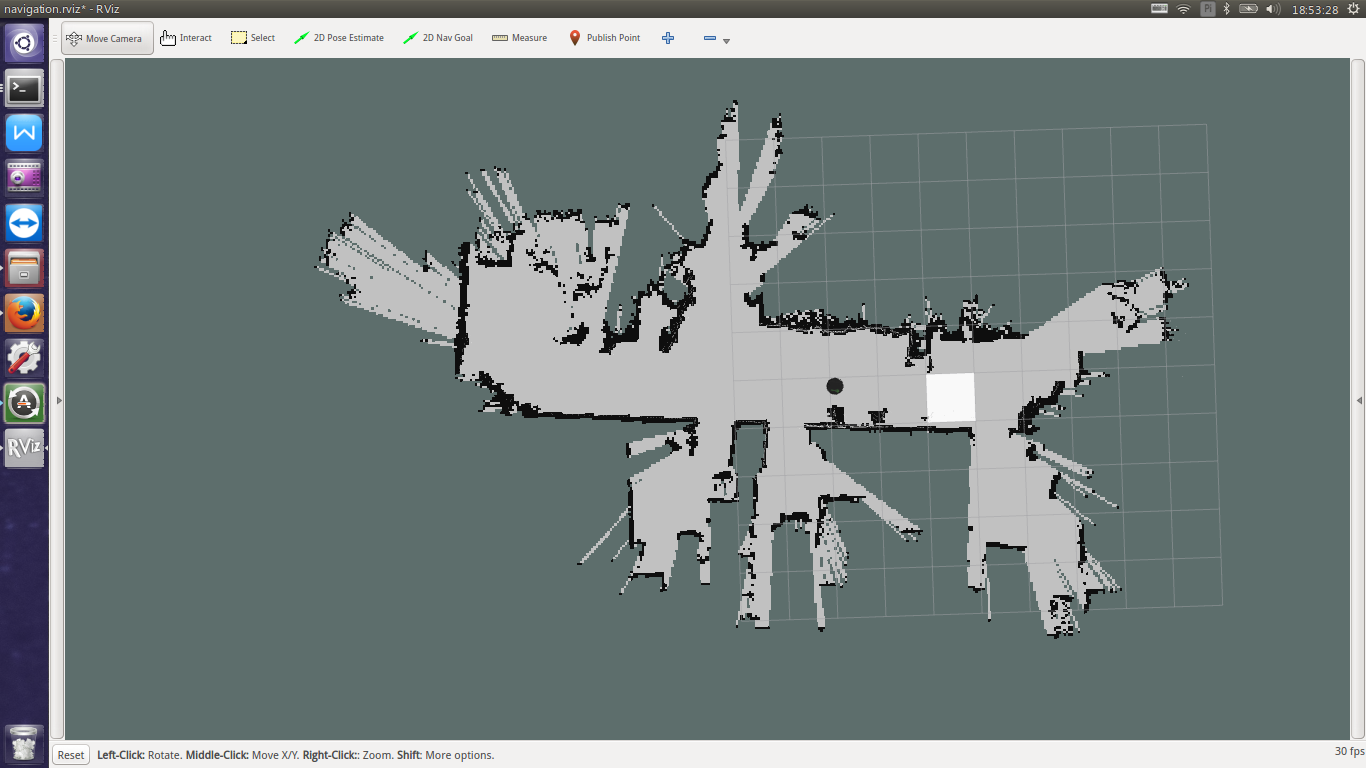
roslaunch turtlebot_teleop keyboard_teleop.launch- 从机,新终端,打开rviz
roslaunch turtlebot_rviz_launchers view_navigation.launch- 效果如下:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号