



















ROS与激光雷达入门教程-ROS中使用激光雷达(威力登VLP-16)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与激光雷达入门教程-ROS中使用激光雷达(威力登vlp-16)
说明:
- 介绍如何在ros下使用velodyne vlp-16线激光雷达
步骤:
-
首先将velodyne 16与电脑相连
-
velodyne上电(12v)
-
通过以太网网口连接电脑
-
新增网络vlp-16,以太网->ipv4设置->方法:手动,更改配置
address :192.168.1.102
netmask: 255.255.255.0
gateway: 192.168.1.1 -
然后打开浏览器输入192.168.1.201可以看到激光雷达的配置文件
-
安装激光驱动
-
YOURDISTRO 指:indigo 或者 kinetic
sudo apt-get install ros-YOURDISTRO-velodyne - 安装ros工程包
cd ~/velodyne_ws/src
git clone https://github.com/ros-drivers/velodyne.git
rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro YOURDISTRO -y
cd ~/velodyne_ws/
catkin build 或者catkin_make- 测试
roslaunch velodyne_pointcloud VLP16_points.launch-
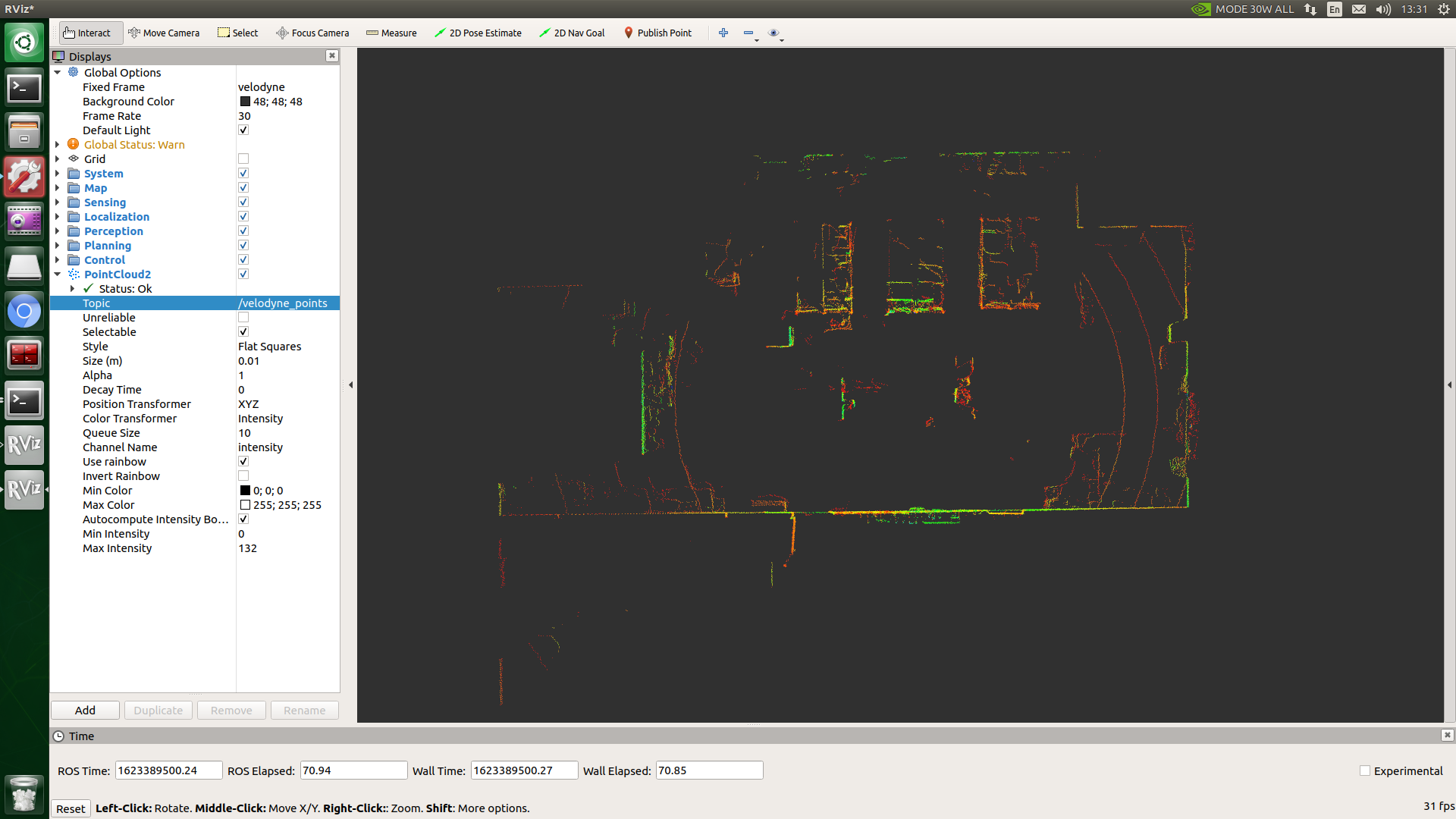
配置rviz
-
将fixed frame 写成 velodyne
-
点击add,选择pointcloud2,点击ok
-
在新的pointcloud2区域的topic中选择/velodyne_points.
-
如图:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号