



















ROS与激光雷达入门教程-ROS中使用激光雷达(RPLIDAR)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与激光雷达入门教程-ROS中使用激光雷达(RPLIDAR)
说明
- 介绍激光雷达(RPLIDAR)
- 介绍在ROS中安装和测试
激光雷达(RPLIDAR)
- RPLIDAR是低成本的二维雷达解决方案,由SlamTec公司的RoboPeak团队开发。
- 它能扫描360°,6米半径的范围。
- 它适合用于构建地图,SLAM,和建立3D模型。
固定雷达
-
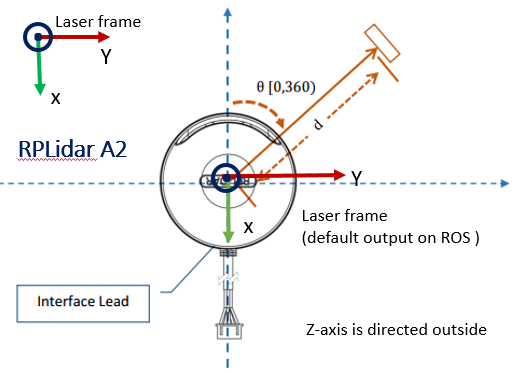
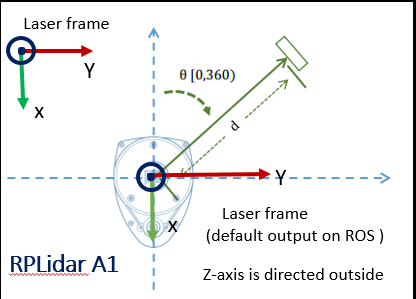
rplidar是顺时针方向旋转
-
测距部分在前,有线部分在尾
-
rplidar A2固定图示:
-
rplidar A1固定图示:
安装
- 建立工作空间(也可以利用现有的),编译包
$ mkdir -p ~/turtlebot_ws/src
$ cd ~/turtlebot_ws/src
## 激光雷达rplidar驱动
$ git clone https://github.com/Slamtec/rplidar_ros- 编译包
$ cd ~/turtlebot_ws
$ catkin_make -DCATKIN_WHITELIST_PACKAGES="rplidar_ros"- 添加环境变量,在~/.bashrc最后添加一行:
$ echo "source ~/turtlebot_ws/devel/setup.bash" >> ~/.bashrc- 刷新配置
$ source ~/.bashrc- 或
$ rospack profile配置
- 检查端口权限
$ ls -l /dev |grep ttyUSB- 设置端口权限666
$ sudo chmod 666 /dev/ttyUSB0测试
- 运行rplidar和并打开rviz查看
$ roslaunch rplidar_ros view_rplidar.launch #波特率为115200运行
$ roslaunch rplidar_ros view_rplidar_a3.launch #波特率为256000运行使用别名
- 建立别名
- 运行脚本创建别名
$ ./scripts/create_udev_rules.sh-
识别别名
-
执行之后,要重新拨插一下usb线, 才能识别到别名
-
使用别名
-
在启动的launch文件,修改使用别名如下
<param name="serial_port" type="string" value="/dev/rplidar"/>参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号