



















ROS与激光雷达入门教程-ROS中使用激光雷达(速腾RS-lidar-16)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与激光雷达入门教程-ROS中使用激光雷达(速腾RS-lidar-16)
说明:
- 介绍如何在ROS下使用速腾RS-lidar-16激光雷达
- 环境tx2开发板16.04系统
windowns下配置IP:
-
参考官方提供的PDF用户手册
-
安装官方提供U盘里的RSView
-
进行连线:
- 找一个路由器,设置为192.168.1.1
- RS-lidar默认IP是192.168.1.200
- RS-lidar默认可接受数据的IP是192.168.1.102
- RS-lidar的网线接入路由器
- 笔记本也接入到路由器,并设置有线的ip为192.168.1.102
-
如图:

- 打开RSView工具
- 打开RSView->TOOL->RS-lidar information
- 点击GET,更改之后点Set Lidar
- 如图:
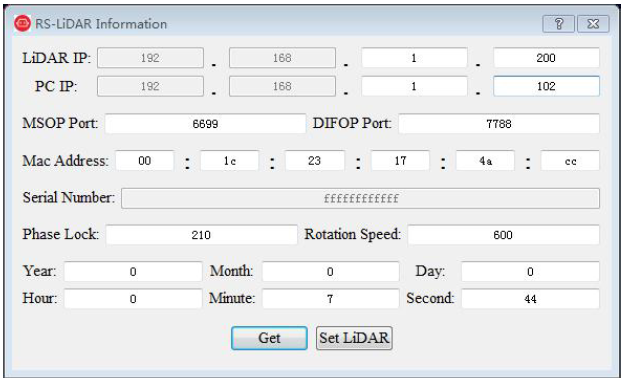
- 按你的需要可以更改为不同的IP地址,如果是192.168.0.x做网段就可以修改为相应的。
ROS下驱动雷达:
- 设置ubuntu的IP地址为:192.168.1.102
- 安装依赖:
sudo apt-get install libpcap-dev- 要不会提示
pcap.h: No such file or directory - 下载和安装源码
$ mkdir -p ~/rslidar_ws/src
$ cd ~/rslidar_ws/src
$ git clone https://github.com/RoboSense-LiDAR/ros_rslidar
$ cd ..
$ catkin_make实时显示:
- 启用环境:
source ~/rslidar_ws/devel/setup.bash- 启动雷达:
roslaunch rslidar_pointcloud rs_lidar_16.launch-
如图:
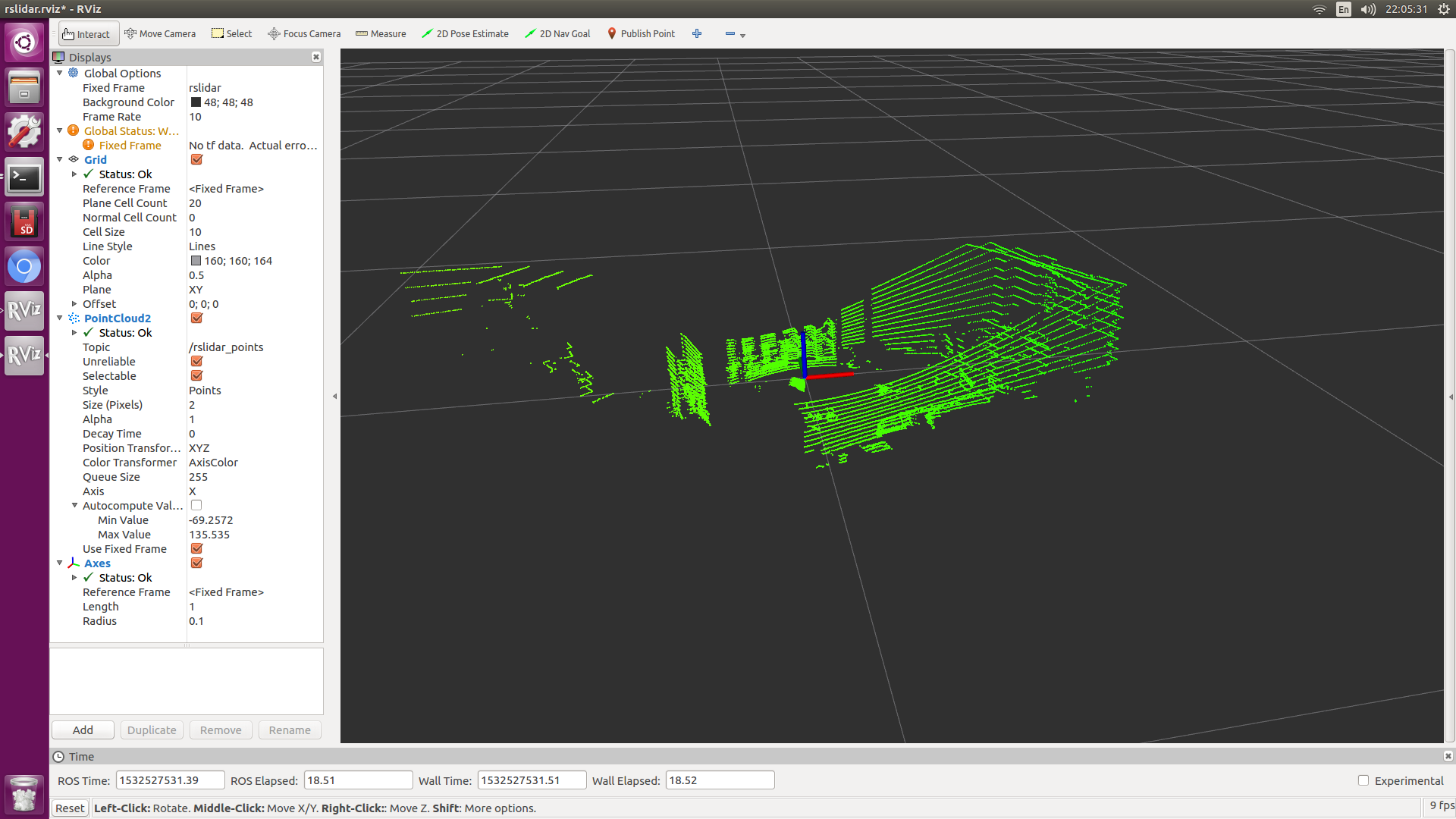
-
查看话题内容
$rostopic list
/clicked_point
/cloud_node/parameter_descriptions
/cloud_node/parameter_updates
/diagnostics
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/rslidar_node/parameter_descriptions
/rslidar_node/parameter_updates
/rslidar_packets
/rslidar_points
/tf
/tf_static纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号