



















ROS与激光雷达入门教程-ROS中使用16线混合固态激光雷达(镭神智能)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何在ROS中使用镭神智能C16系列小型化16线混合固态激光雷达
产品介绍
- 镭神智能自主研发的16线激光雷达拥有超高性价比,可适用于室外无人车,汽车辅助驾驶(ADAS)、无人驾驶等领域
在ROS中使用
-
网络设置
-
连接电源和雷达网络接口

- 连上后,手动设置PC的IP地址为
192.168.1.102

- 设置完成后,使用
ifconfig命令查看有线 ip 是否设置成功
$ ifconfig
enp2s0 Link encap:以太网 硬件地址 6c:2b:59:33:d6:fc
inet 地址:192.168.1.102 广播:192.168.1.255 掩码:255.255.255.0
inet6 地址: fe80::9a90:c66e:e81b:3ae8/64 Scope:Link
UP BROADCAST RUNNING MULTICAST MTU:1500 跃点数:1
接收数据包:981462 错误:0 丢弃:0 过载:0 帧数:0
发送数据包:2118 错误:48 丢弃:0 过载:0 载波:2
碰撞:1 发送队列长度:1000
接收字节:1224774316 (1.2 GB) 发送字节:773407 (773.4 KB)
lo Link encap:本地环回
inet 地址:127.0.0.1 掩码:255.0.0.0
inet6 地址: ::1/128 Scope:Host
UP LOOPBACK RUNNING MTU:65536 跃点数:1
接收数据包:113550 错误:0 丢弃:0 过载:0 帧数:0
发送数据包:113550 错误:0 丢弃:0 过载:0 载波:0
碰撞:0 发送队列长度:1000
接收字节:2897494734 (2.8 GB) 发送字节:2897494734 (2.8 GB)- 使用
ping或者tcpdump命令,测试硬件是否连接正常
$ ping 192.168.1.200
PING 192.168.1.200 (192.168.1.200) 56(84) bytes of data.
64 bytes from 192.168.1.200: icmp_seq=1 ttl=128 time=0.080 ms
64 bytes from 192.168.1.200: icmp_seq=2 ttl=128 time=0.098 ms
64 bytes from 192.168.1.200: icmp_seq=3 ttl=128 time=0.086 ms
64 bytes from 192.168.1.200: icmp_seq=4 ttl=128 time=0.096 ms
64 bytes from 192.168.1.200: icmp_seq=5 ttl=128 time=0.117 ms
//enp2s0为有线网络设备名
$ sudo tcpdump -n -i enp2s0
tcpdump: verbose output suppressed, use -v or -vv for full protocol decode
listening on enp2s0, link-type EN10MB (Ethernet), capture size 262144 bytes
09:40:54.525833 IP 192.168.1.200.2369 > 192.168.1.102.2368: UDP, length 1206
09:40:54.527020 IP 192.168.1.200.2369 > 192.168.1.102.2368: UDP, length 1206
09:40:54.528256 IP 192.168.1.200.2369 > 192.168.1.102.2368: UDP, length 1206- 正如上面显示雷达发送到目的端数据包 1206 个字节,则表示雷达数据发送正常
备注:
- 雷达出厂默认目的 ip:192.168.1.102,要根据雷达实际配置修改的目的 IP 对电脑进行配置
- 第一次设置IP,重启雷达电源
-
软件安装及使用
-
软件安装
$ mkdir -p ~/lslidar_ws/src
$ cd ~/lslidar_ws/src
//ROS包可以从镭神智能的官网或客服处获取,获取后复制到~/lslidar_ws/src下
$ git clone https://github.com/ncnynl/lslidar_C16
$ cd ~/lslidar_ws/ && catkin_make
$ echo "source ~/lslidar_ws/devel/setup.bash" >> ~/.bashrc- 创建Rviz文件
$ vim ~/lslidar_ws/src/lslidar_c16/lslidar_c16_decoder/launch/lslidar_c16.rviz
//添加以下内容
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
Splitter Ratio: 0.5
Tree Height: 565
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.588679016
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: PointCloud2
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.0299999993
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 10
Min Value: -10
Value: true
Axis: Z
Channel Name: intensity
Class: rviz/PointCloud2
Color: 255; 255; 255
Color Transformer: Intensity
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 198
Min Color: 0; 0; 0
Min Intensity: 0
Name: PointCloud2
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.00999999978
Style: Flat Squares
Topic: /lslidar_point_cloud
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Default Light: true
Fixed Frame: laser_link
Frame Rate: 30
Name: root
Tools:
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/MoveCamera
- Class: rviz/Select
- Class: rviz/FocusCamera
- Class: rviz/Measure
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
- Class: rviz/PublishPoint
Single click: true
Topic: /clicked_point
Value: true
Views:
Current:
Class: rviz/Orbit
Distance: 17.6234169
Enable Stereo Rendering:
Stereo Eye Separation: 0.0599999987
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 0
Y: 0
Z: 0
Focal Shape Fixed Size: true
Focal Shape Size: 0.0500000007
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.00999999978
Pitch: 0.785398006
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 0.785398006
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 846
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000016a000002c4fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006100fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c0061007900730100000028000002c4000000d700fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000002c4fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a005600690065007700730100000028000002c4000000ad00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004b00000003efc0100000002fb0000000800540069006d00650100000000000004b00000030000fffffffb0000000800540069006d006501000000000000045000000000000000000000022b000002c400000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1200
X: 65
Y: 60- 启动程序
$ roslaunch lslidar_c16_decoder lslidar_c16.launch --screen
... logging to /home/lalala/.ros/log/7a8cea76-d8ec-11e9-b618-6c2b5933d6fc/roslaunch-lalala-Inspiron-3576-5233.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.1.102:36347/
SUMMARY
========
PARAMETERS
* /lslidar_c16_decoder_node/angle3_disable_max: 0
* /lslidar_c16_decoder_node/angle3_disable_min: 0
* /lslidar_c16_decoder_node/angle_disable_max: 0
* /lslidar_c16_decoder_node/angle_disable_min: 0
* /lslidar_c16_decoder_node/channel_num: 0
* /lslidar_c16_decoder_node/frame_id: laser_link
* /lslidar_c16_decoder_node/frequency: 10.0
* /lslidar_c16_decoder_node/max_range: 150.0
* /lslidar_c16_decoder_node/min_range: 0.15
* /lslidar_c16_decoder_node/point_num: 2000
* /lslidar_c16_decoder_node/publish_point_cloud: True
* /lslidar_c16_decoder_node/publish_scan: True
* /lslidar_c16_decoder_node/use_gps_ts: False
* /lslidar_c16_driver_node/add_multicast: False
* /lslidar_c16_driver_node/device_port: 2368
* /lslidar_c16_driver_node/group_ip: 224.1.1.2
* /lslidar_c16_driver_node/lidar_ip: 192.168.1.200
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
lslidar_c16_decoder_node (lslidar_c16_decoder/lslidar_c16_decoder_node)
lslidar_c16_driver_node (lslidar_c16_driver/lslidar_c16_driver_node)
auto-starting new master
process[master]: started with pid [5243]
ROS_MASTER_URI=http://192.168.1.102:11311
setting /run_id to 7a8cea76-d8ec-11e9-b618-6c2b5933d6fc
process[rosout-1]: started with pid [5256]
started core service [/rosout]
process[lslidar_c16_driver_node-2]: started with pid [5272]
process[lslidar_c16_decoder_node-3]: started with pid [5274]
[ INFO] [1568684580.115466190]: namespace is /lslidar_c16_driver_node
[ INFO] [1568684580.123349604]: Opening UDP socket: address 192.168.1.200
[ INFO] [1568684580.123385941]: Opening UDP socket: port 2368
[ INFO] [1568684580.123419348]: expected frequency: 833.333 (Hz)
[ INFO] [1568684580.124647095]: Opening UDP socket: port 2368
[ INFO] [1568684580.124678308]: Initialised lslidar c16 without error
[ WARN] [1568684580.131127438]: discard Point cloud angle from 0.00 to 0.00
[ WARN] [1568684580.131182506]: switch angle from 6.28 to 6.28 in left hand rule
[ WARN] [1568684580.136251472]: Using GPS timestamp or not 0
[ INFO] [1568684580.560078684]: default channel is 0备注:
- 若出现
timeout则表示接收不到数据,请检查硬件连接- 若修改了雷达目的端口及转速,请打开
lslidar_C16.launch进行相应的修改配置,默认IP为192.168.1.200,默认端口为2368,转速为10HZ即point_num为2000
- 启动Rviz
$ rosrun rviz rviz -d rospack find lslidar_c16_decoder/launch/lslidar_c16.rviz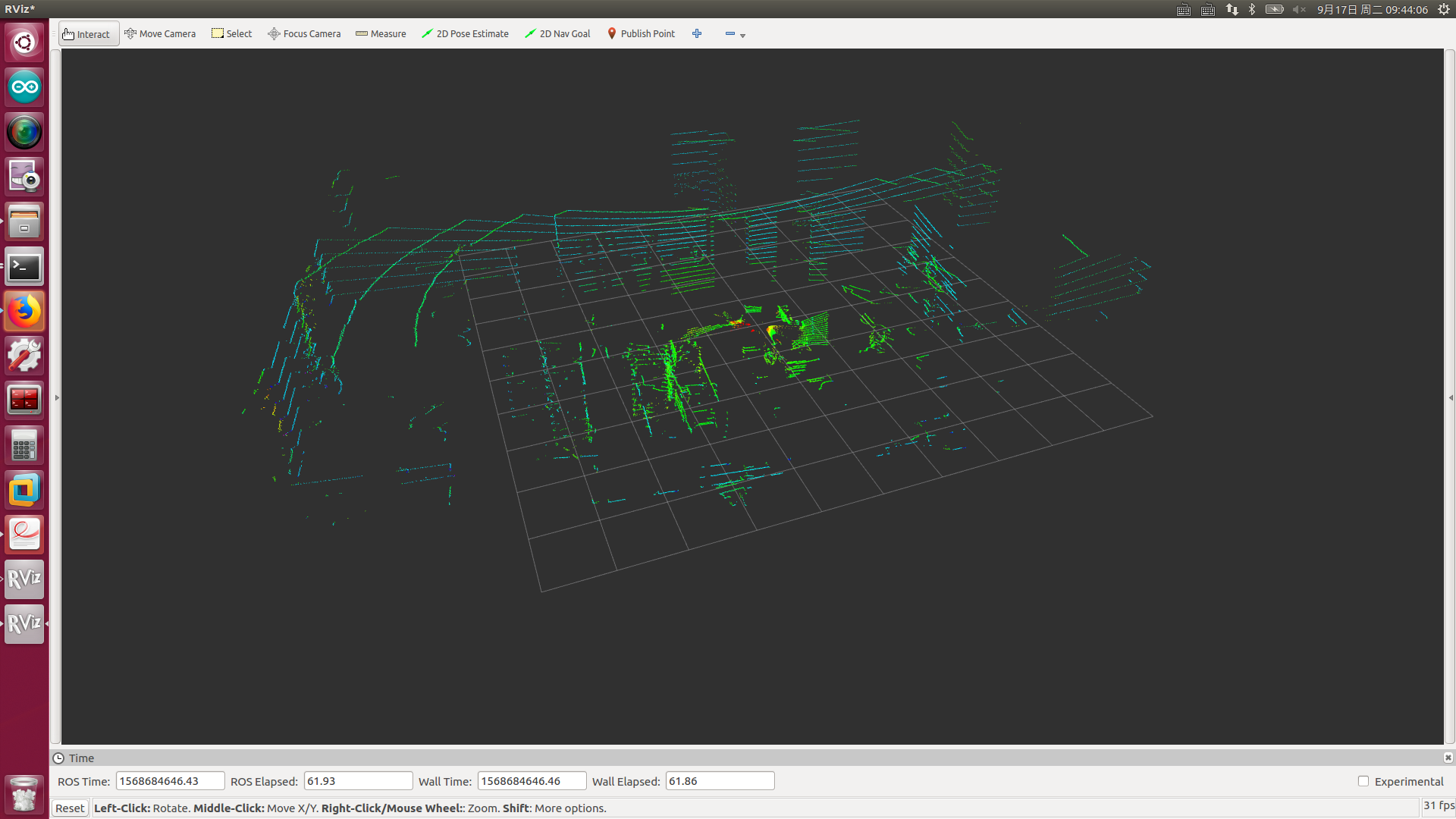
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=68053883&cid=117956051&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号