



















OpenManipulator机械臂入门教程-仿真
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍在gazebo中进行OpenManipulator机械臂仿真
纯gazebo仿真
- [PC] 在Gazebo上加载OpenManipulator机械臂, 需要点击 ▶ 按钮进行启动.
$ roslaunch open_manipulator_gazebo open_manipulator_gazebo.launch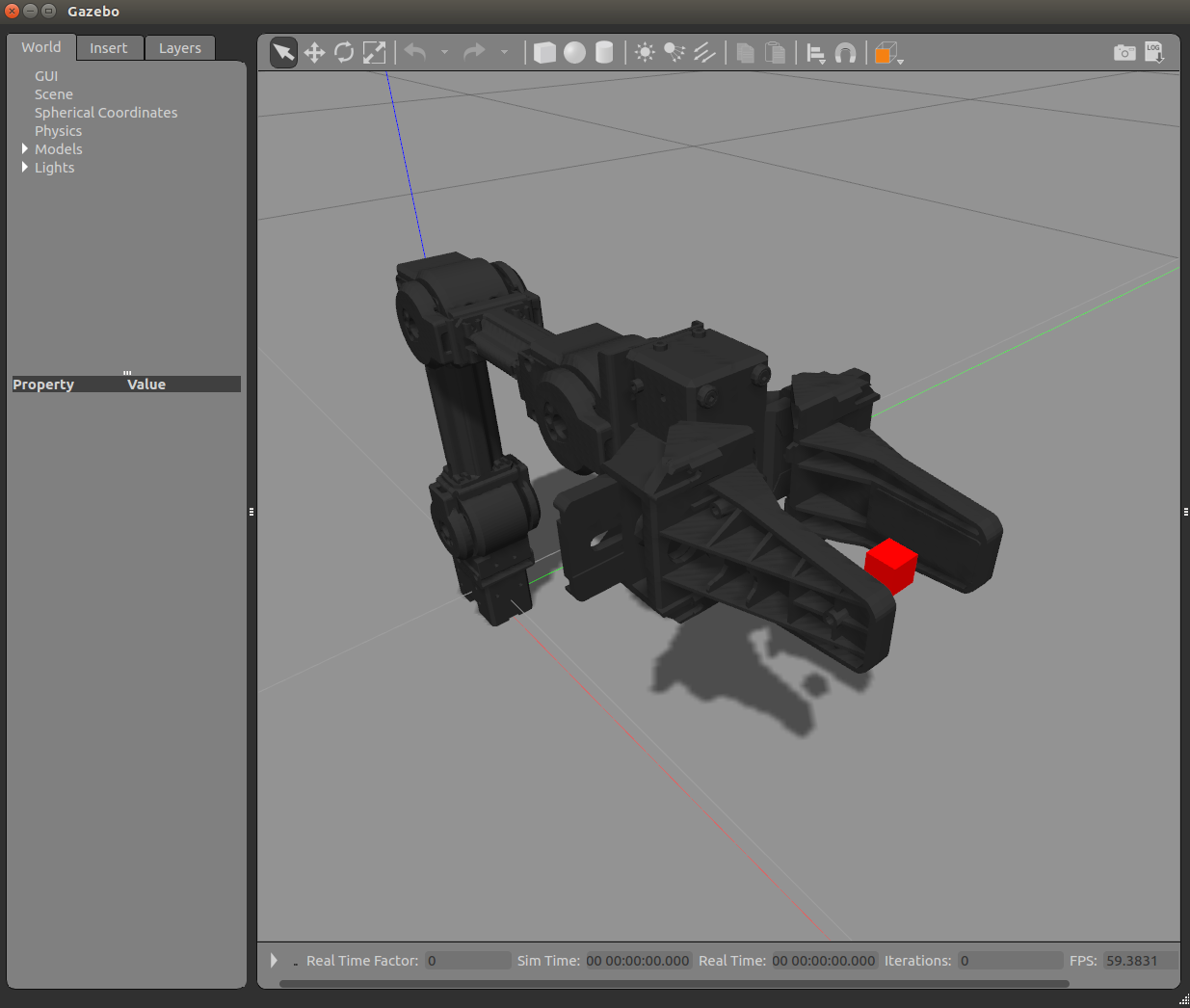
- 启动机械臂控制程序
$ roslaunch open_manipulator_controller open_manipulator_controller.launch use_platform:=false
SUMMARY
========
PARAMETERS
* /open_manipulator/control_period: 0.01
* /open_manipulator/moveit_sample_duration: 0.05
* /open_manipulator/planning_group_name: arm
* /open_manipulator/using_moveit: False
* /open_manipulator/using_platform: False
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
open_manipulator (open_manipulator_controller/open_manipulator_controller)
ROS_MASTER_URI=http://localhost:11311
process[open_manipulator-1]: started with pid [9820]
[ INFO] [1544506914.862653563]: Ready to simulate /open_manipulator on Gazebo- 但若需要使用MoveIt!,可以在命令行后面添加
use_moveit:=true
GUI控制
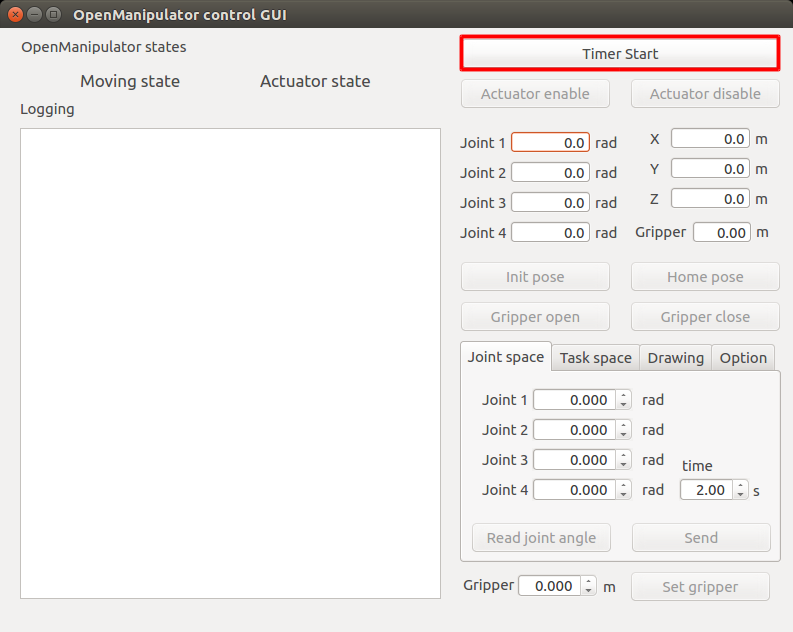
- 启动命令
roslaunch open_manipulator_control_gui open_manipulator_control_gui.launch- 效果图
键盘控制
- 启动命令
roslaunch open_manipulator_teleop open_manipulator_teleop_keyboard.launch- 效果如下
---------------------------
Control Your OpenManipulator!
---------------------------
w : increase x axis in task space
s : decrease x axis in task space
a : increase y axis in task space
d : decrease y axis in task space
z : increase z axis in task space
x : decrease z axis in task space
y : increase joint 1 angle
h : decrease joint 1 angle
u : increase joint 2 angle
j : decrease joint 2 angle
i : increase joint 3 angle
k : decrease joint 3 angle
o : increase joint 4 angle
l : decrease joint 4 angle
g : gripper open
f : gripper close
1 : init pose
2 : home pose
q to quit
---------------------------
Present Joint Angle J1: 0.000 J2: 0.000 J3: 0.000 J4: 0.000
Present Kinematics Position X: 0.000 Y: 0.000 Z: 0.000
---------------------------gazebo+moveit仿真
- 启动命令
roslaunch open_manipulator_controllers joint_trajectory_controller.launch- 这个命令别人启动gazebo + 机械臂控制 + move_group + rviz
- 在启动gazebo仿真后,需要点击 ▶ 按钮进行启动,要不movegroup不能正常运行,rviz也不能正常打开
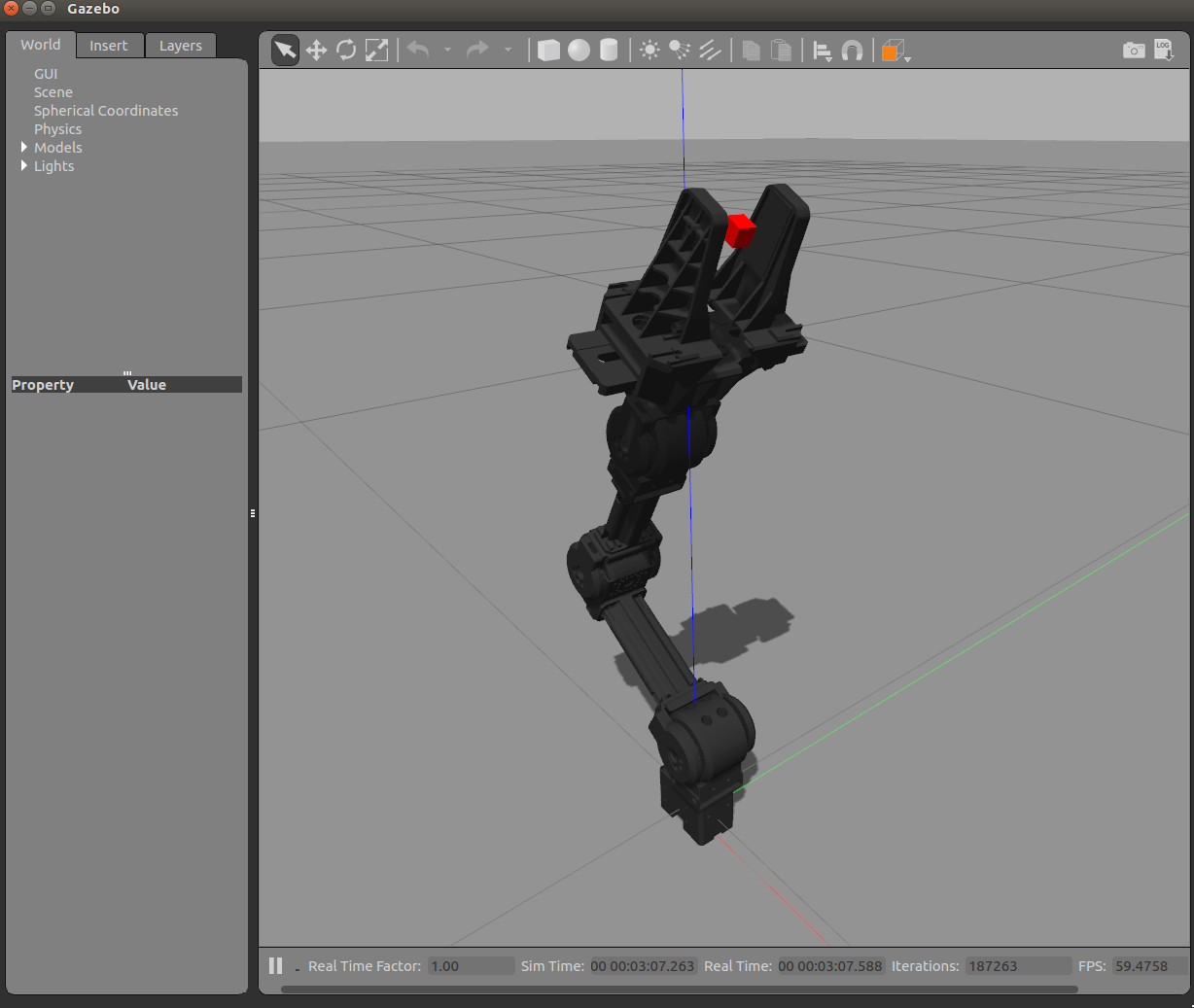
- gazebo效果图
- rviz效果图
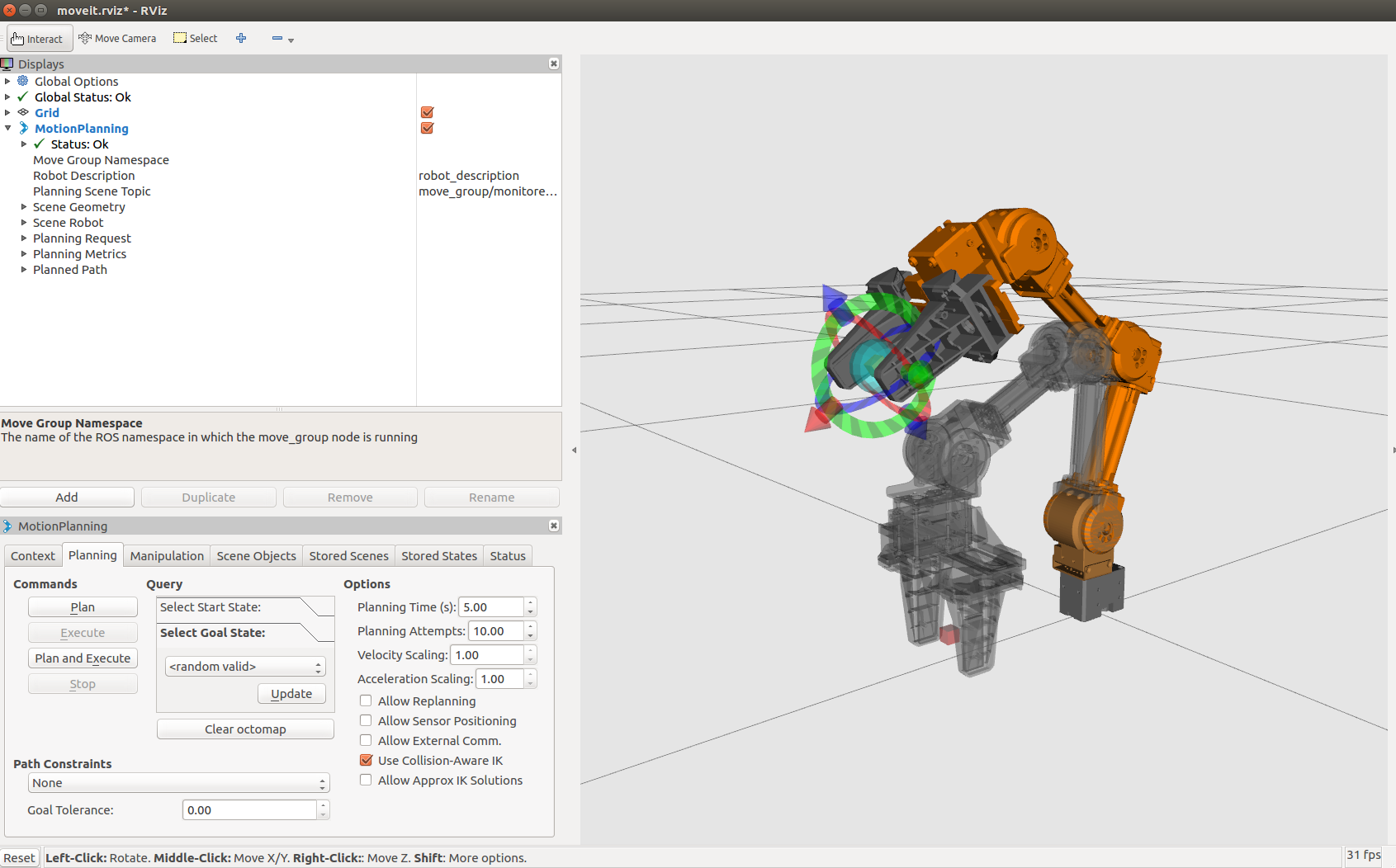
- 在rviz上在不同方向拖动箭头,再点击Plan and execute来执行
- gazebo上的机械臂和rviz的模型动作就会同步执行,移动到新的位置
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号