



















OpenManipulator机械臂入门教程-GUI界面控制
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何在GUI界面下使用OpenManipulator机械臂
操作步骤
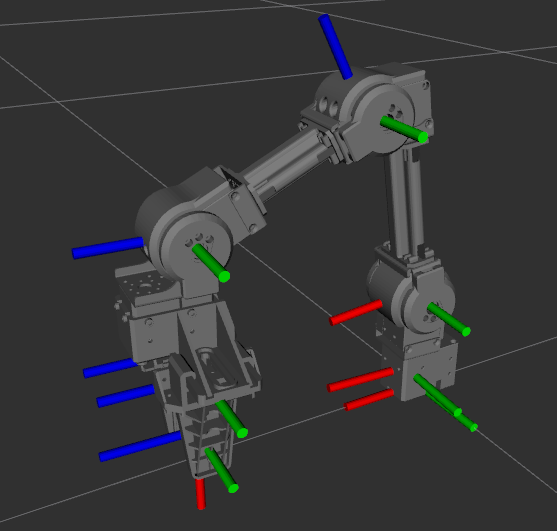
- 建议启动机械臂前请将机械臂手动设置以下姿势,以避免启动后出现无法控制的问题
- 启动机械臂
$ roslaunch open_manipulator_controller open_manipulator_controller.launch usb_port:=/dev/ttyACM0- 启动GUI界面
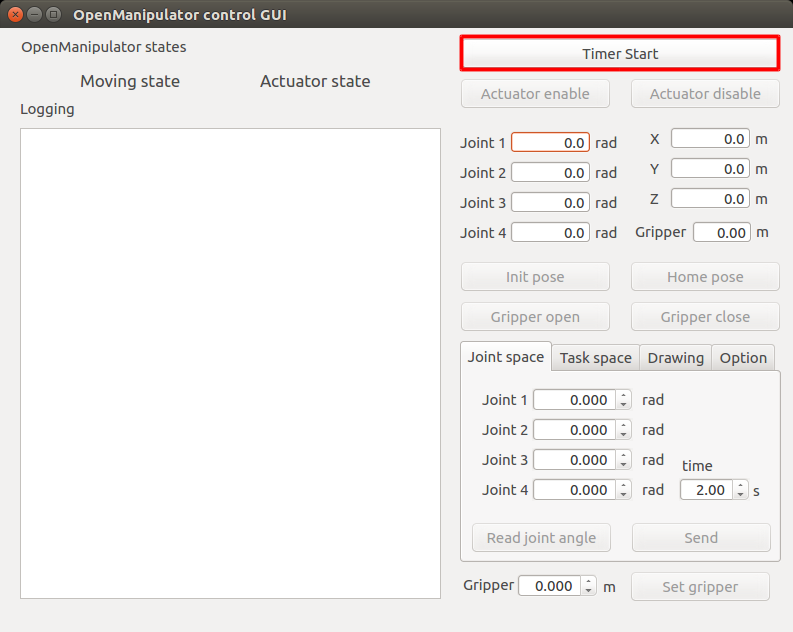
$ roslaunch open_manipulator_control_gui open_manipulator_control_gui.launch- 首先点击单击
Timer Start按钮
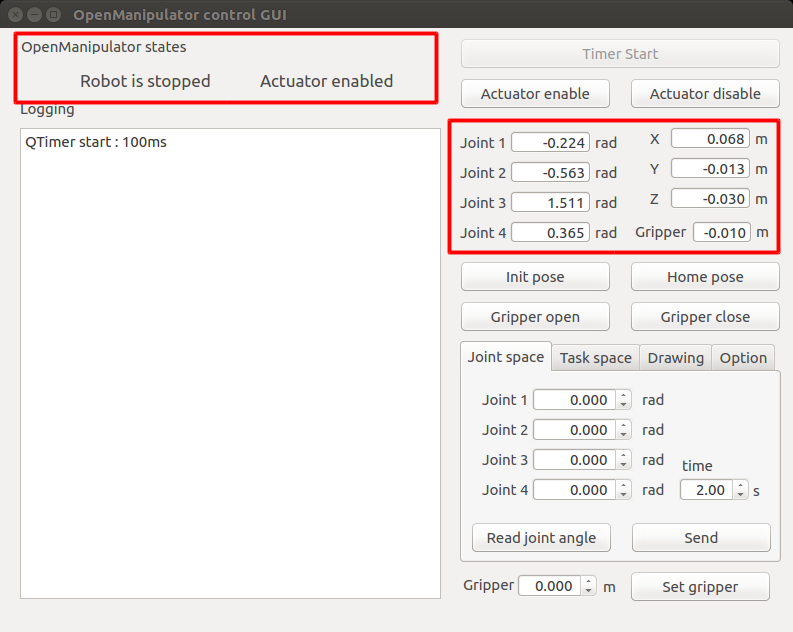
- 检查OpenManipulator机械臂的状态(关节状态,运动位姿)。
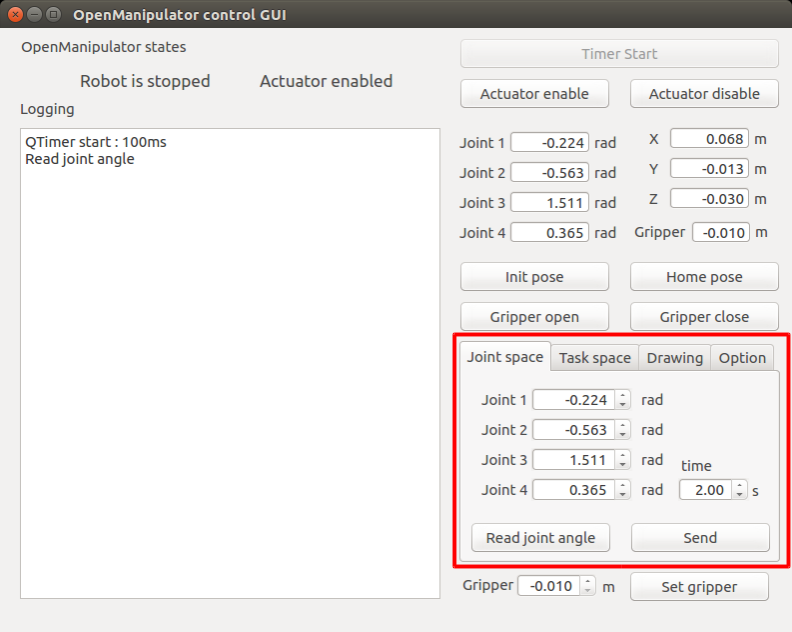
- 在 joint space操作机械臂。输入轨迹的关节角度和总时间,然后点击
send按钮
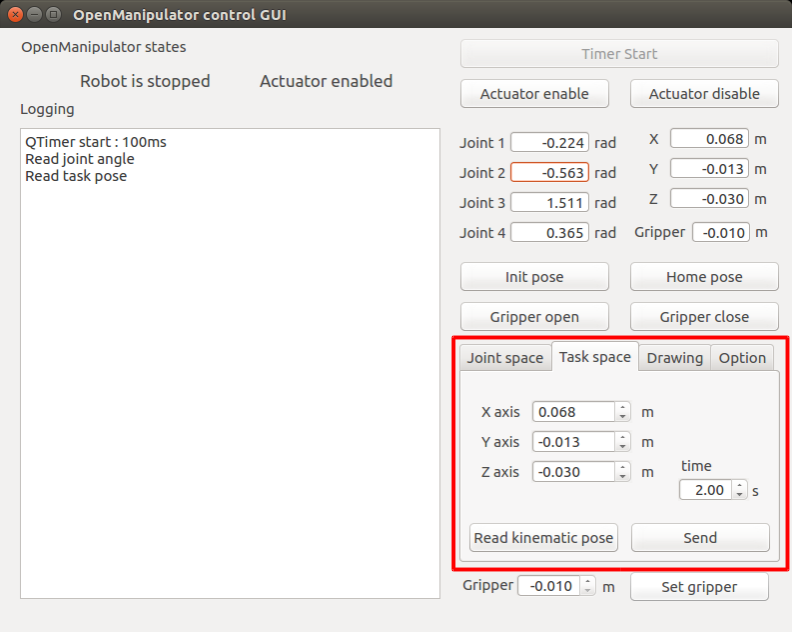
- 在task space里操作机械臂。Enter the kinematics pose of the OpenManipulator end-effector(tool) in the task space and the total time of the trajectory. 然后点击
send按钮
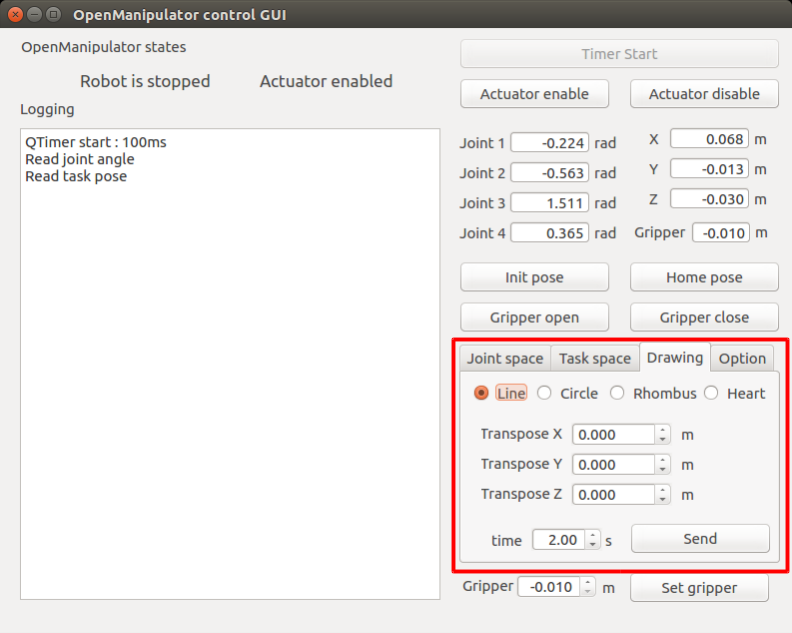
- 使用机械臂进行描绘轨迹。首先确认轨迹类型(直线,圆,菱形和心),再根据轨迹类型和描绘轨迹的总时间来输入参数,然后点击
send按钮
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=69164988&cid=119870409&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号