



















OpenManipulator机械臂入门教程-利用opencr控制机械臂(非ROS)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
-
OpenManipulator与OpenCR板相互兼容。
-
官方提供了一个API支持Dynamixel,Dynamixel X,包括protocol 1.0 和 2.0的API来控制该机械臂。
注:在本教程中OpenCRipulator机械臂由OpenCR(嵌入式系统)控制的方式与ROS完全不同。在使用ROS的方法中,机械臂在PC中运行,但在OpenCR控制中,机械臂在没有ROS的OpenCR中运行。
OpenCR设置
- 用USB数据线连接PC,机械臂连接到OpenCR板,同时使用12V的电源向OpenCR供电

- 欲了解更多关于OpenCR的资料,请参阅:OpenCR官方链接
上传示例源码到OpenCR板
-
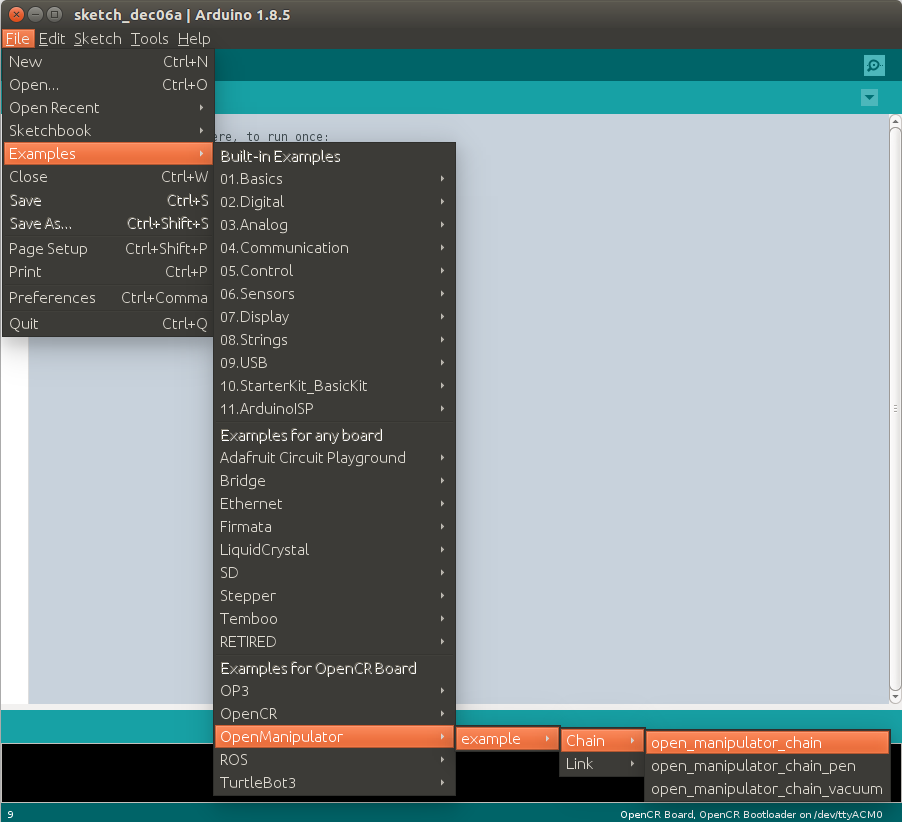
找到示例并上传
Examples→OpenManipulator→example→Chain→open_manipulator_chain
注:如果上传时出现
cmd_read_board_name fail: 0xF020的错误信息,请参阅OpenCR e-manual。进入到固件恢复模式,重新烧录固件
Processing
-
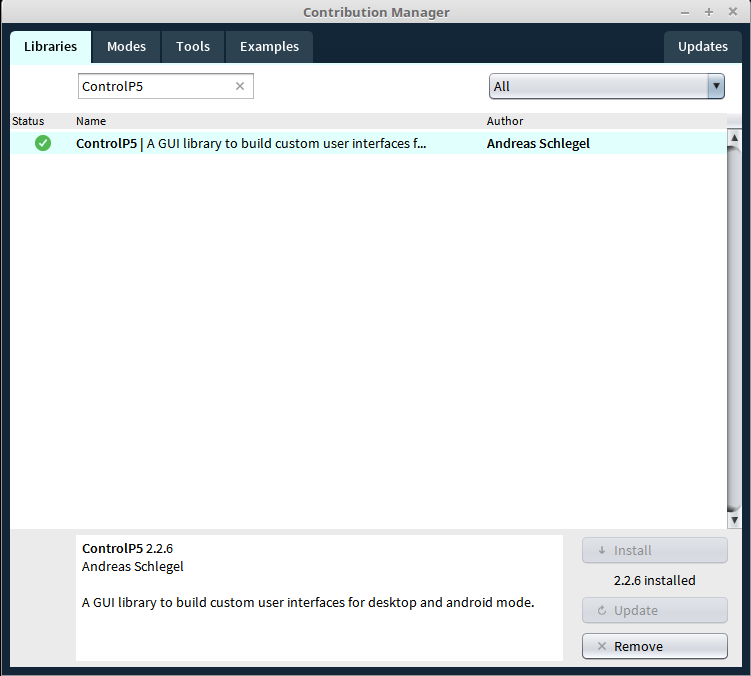
打开Processing,进行到
tools→Add Tool...选择并安装ControlP5
- [PC] 下载OpenManipulator机械臂的processing源代码
$ git clone https://github.com/ROBOTIS-GIT/open_manipulator_processing.git- 在processing IDE上打开processing源代码文件
open_manipulator_processing→Chain→Chain.pde
NOTE: Upload OpenCR example source code to OpenCR before run processing source code.
Basic Manipulation on OpenCR
NOTE: Upload OpenCR example source code to OpenCR before run processing source code.
-
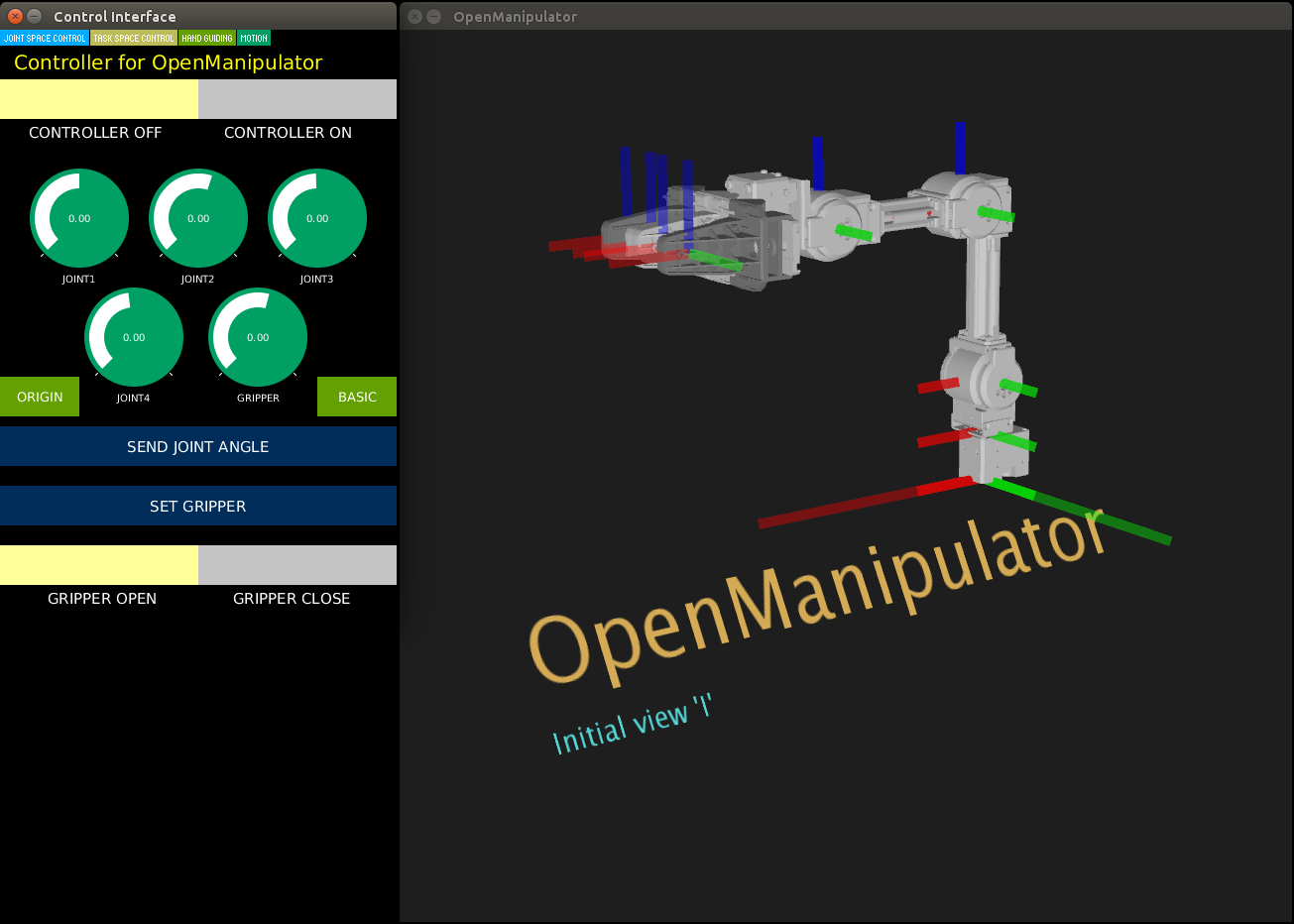
控制界面
-
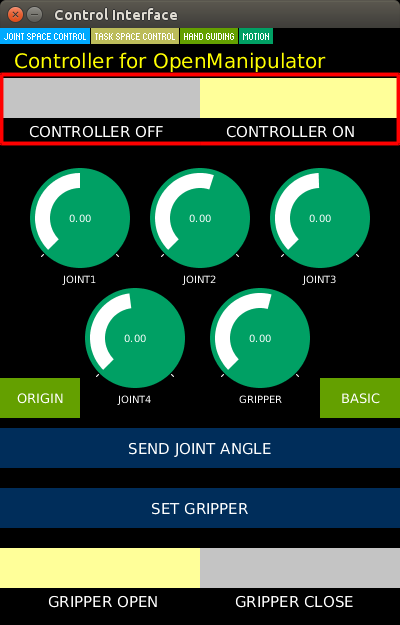
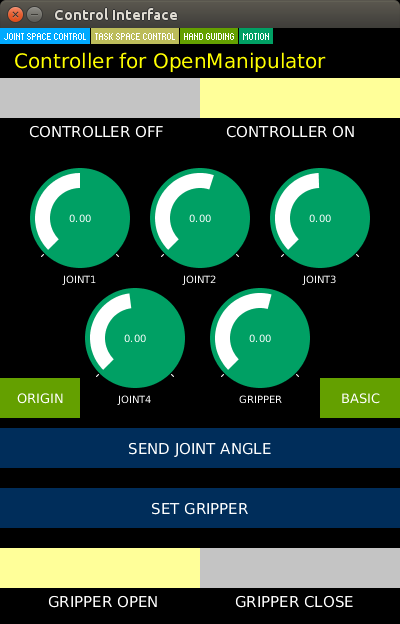
点击
CONTROLLER ON开始控制机械臂
- 在joint space上对机械臂进行控制。设置好关节的角度和抓手的参数,然后点击
JOINT ANGLE和GRIPPER。
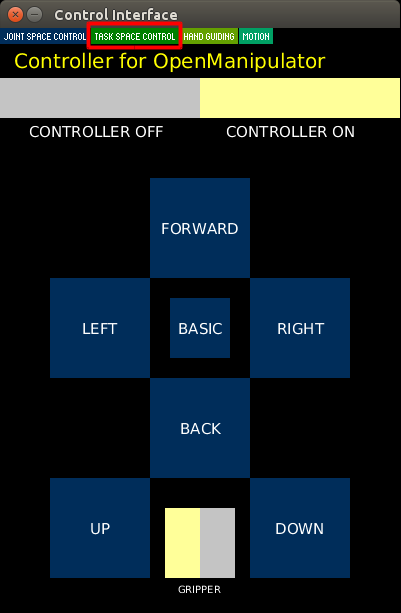
- The user can manipulate the OpenManipulator in the (task space). Click the
TASK SPACE CONTROLbutton to change the tab.Click the desired direction button to manipulate the OpenManipulator.
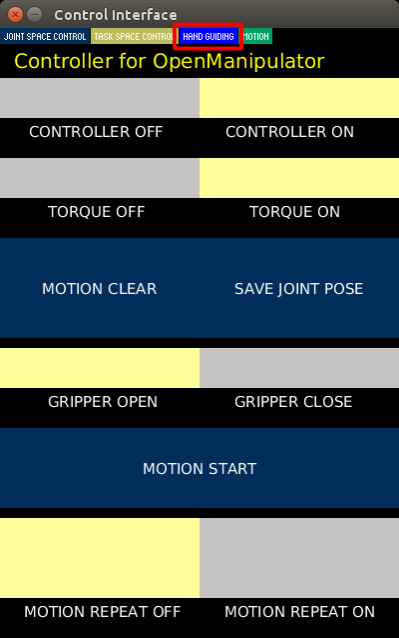
Hand guiding
- 操作步骤:
1.Click the HAND GUIDING button to change the tab.
2.Holds the OpenManipulator by hand and click the toggle button to TORQUE OFF.
3.Move the OpenManipulator to the desired pose by hand.
4.Click the SAVE JOINT POSE to save the present pose.
5.Repeat step 3 and 4 to create the demonstration.
6.Click the toggle button to TORQUE ON
7.Click the MOTION START button to start the saved poses.-
Click the toggle button to MOTION REPEAT ON if you want to repeat the demonstration.
-
The total time of the trajectory between saved poses is the same as 2 seconds.
RC100手柄控制
- RC100手柄与BT410蓝牙接收器搭配在OpenCR上使用

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号