



















OpenManipulator机械臂入门教程-Message List
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍OpenManipulator发布的topic、订阅的topic和service等
Topic
-
Topic Monitor
-
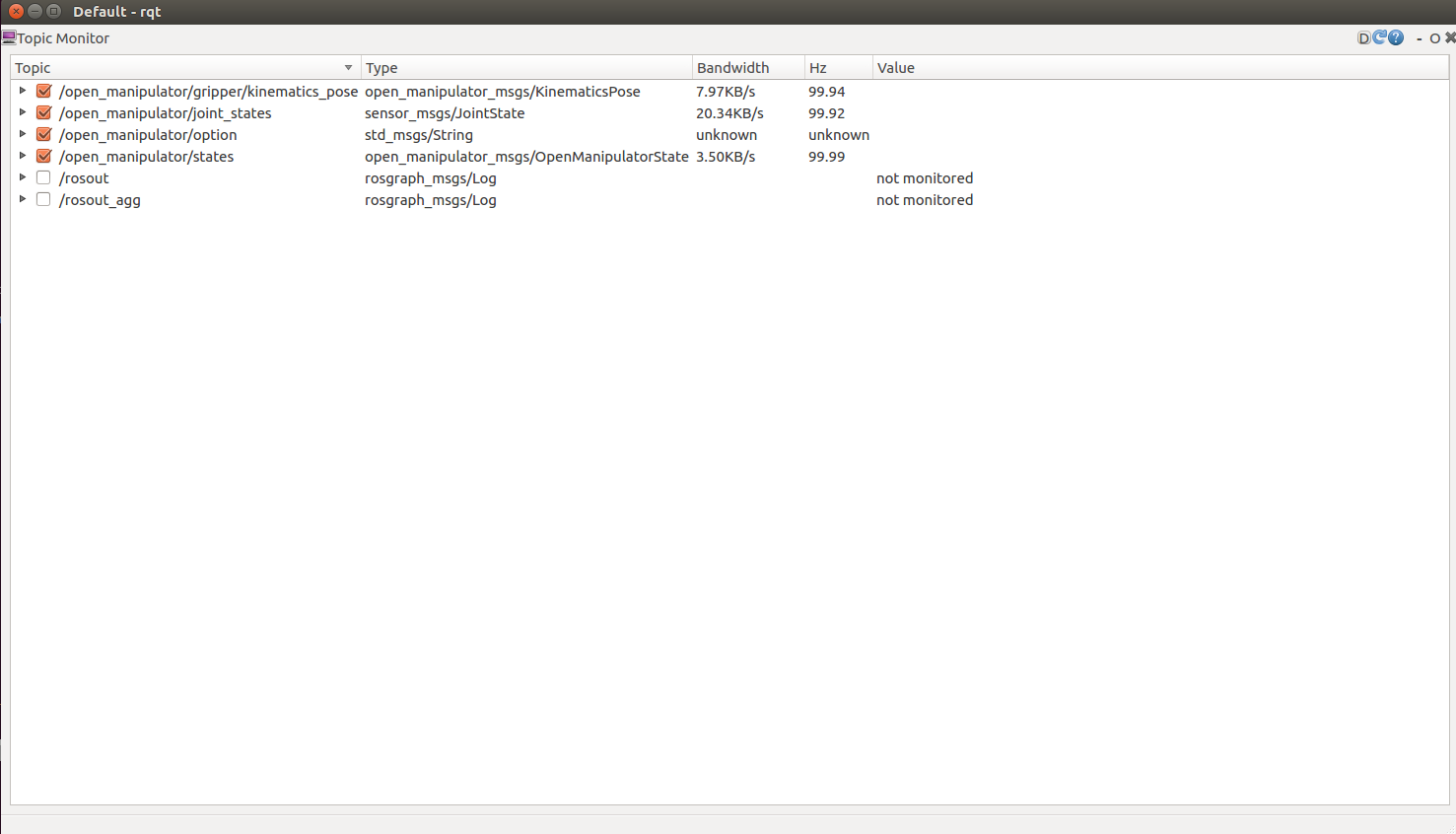
通过ROS中的rqt来查看topic list中的topic状态
-
运行rpt
$ rqt提示:最大化rqt窗口,在左上角的选项中选择
plugin- >Topics- >Topic Monitor。点击topic左边的复选框选择需要监听的topic
-
Published Topic List
-
已发布的topic列表:
- /open_manipulator/joint_states
- /open_manipulator/gripper/kinematics_pose
- /open_manipulator/states注:这些topic用于检查机械臂的状态,与其运动无关
/open_manipulator/joint_states(sensor_msgs/ JointState)is a message indicating the states of joints of OpenManipulator.
- "name" indicates joint component names.
- "effort" shows currents of the joint Dynamixels.
- "position" and "velocity" indicates angles and angular velocities of joints.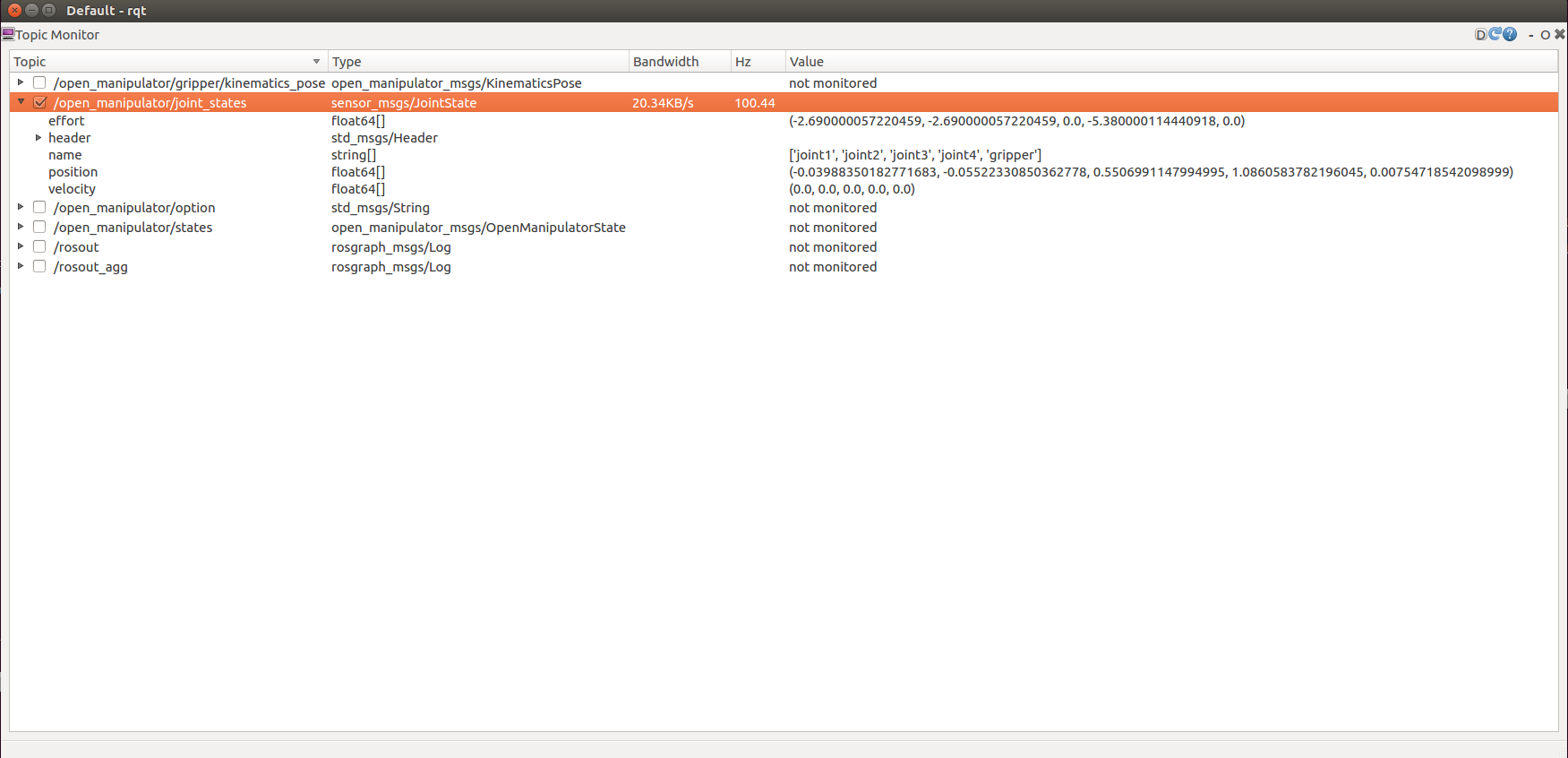
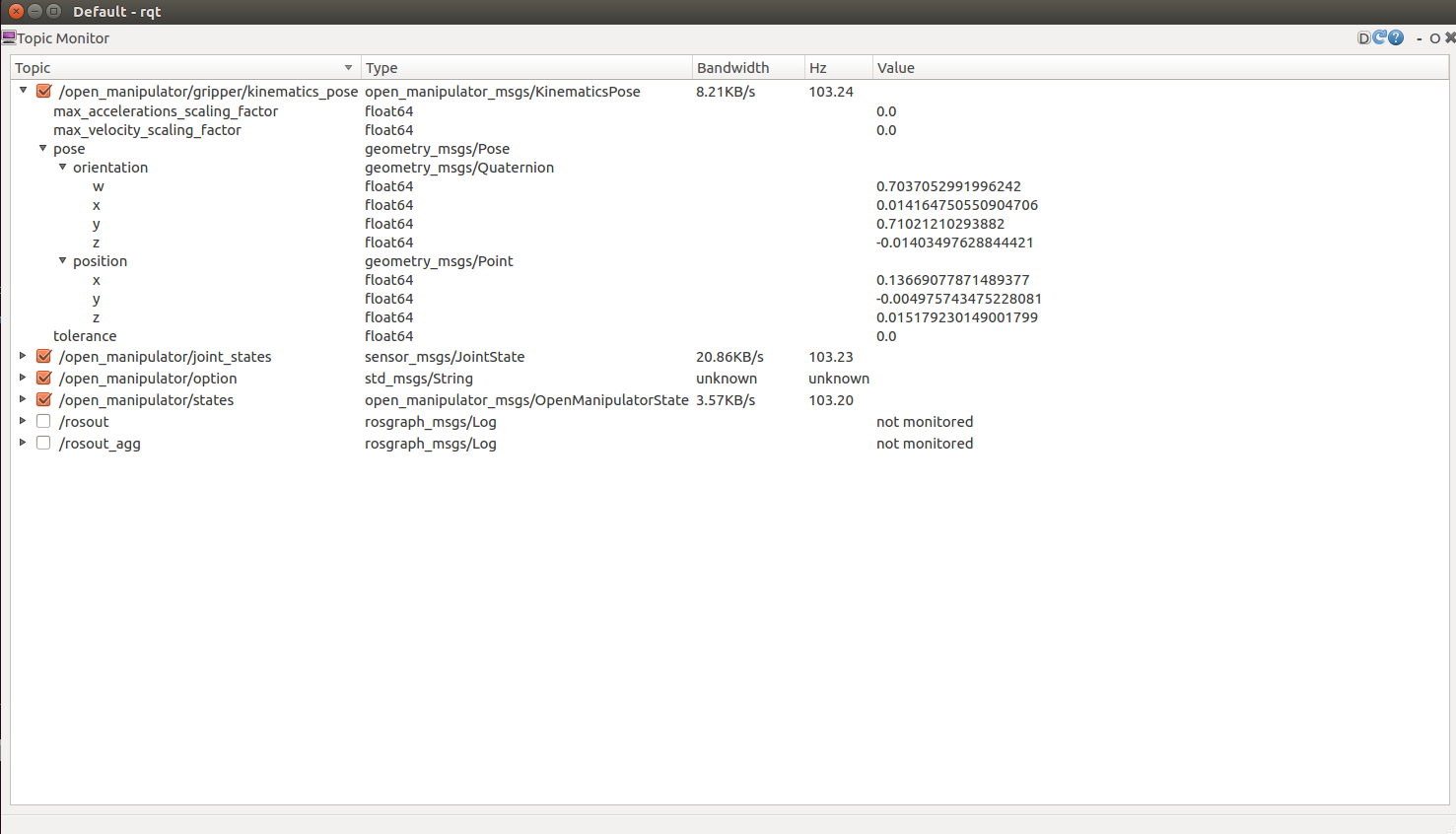
/open_manipulator/gripper/kinematics_pose(open_manipulator_msgs/KinematicsPose) is a message indicating pose (position and orientation) in task space.
- "position" indicates the x, y and z values of the center of the end-effector (tool).
- "Orientation" indicates the direction of the end-effector (tool) as quaternion.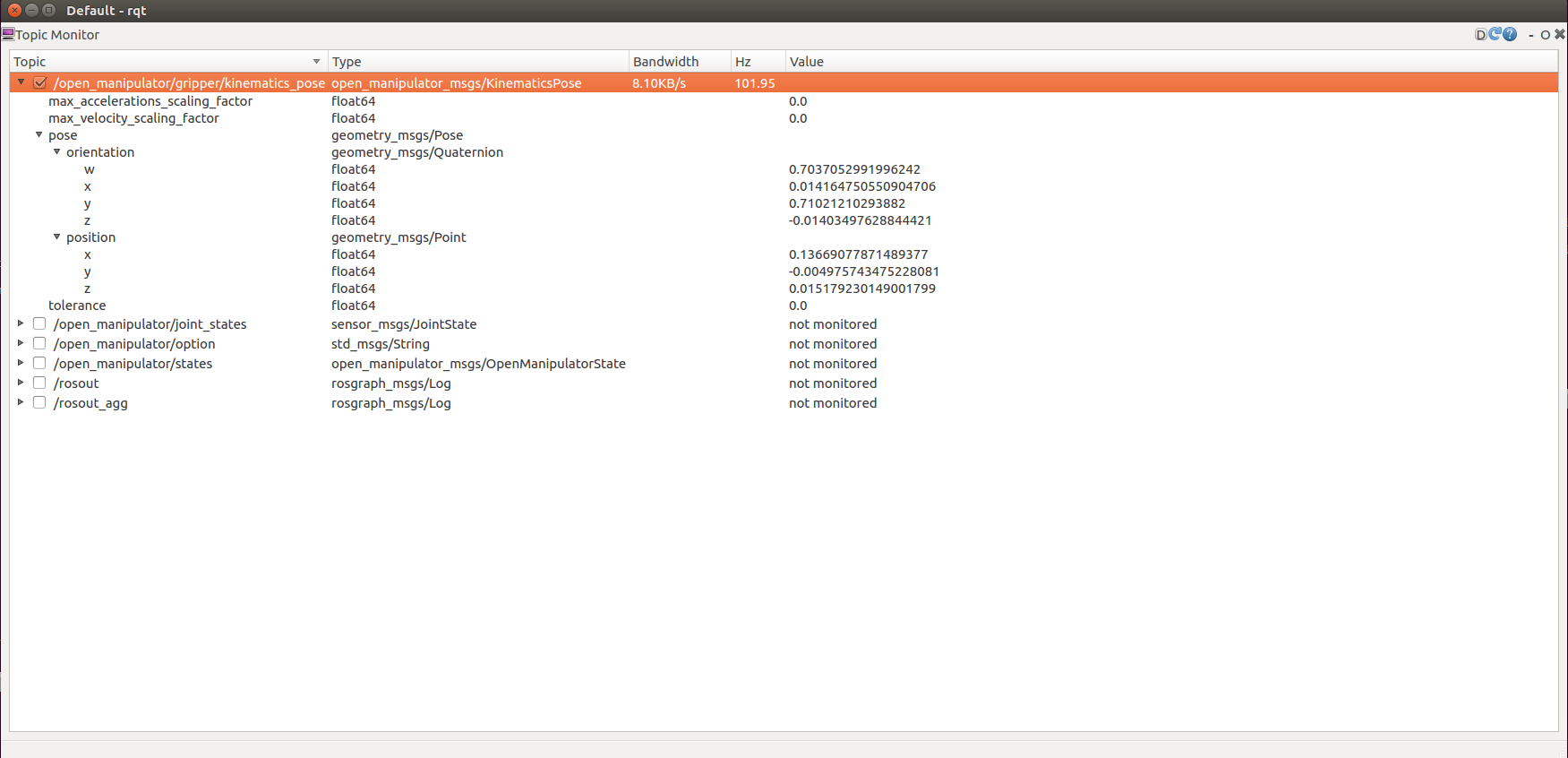
/open_manipulator/states(open_manipulator_msgs/OpenManipulatorState) is a message indicating the status of OpenManipulator.
- "open_manipulator_actuator_state" indicates whether actuators (Dynamixels) are enabled ("ACTUATOR_ENABLE") or disabled ("ACTUATOR_DISABLE").
- "open_manipulator_moving_state" indicates whether OpenManipulator is moving along the trajectory ("IS_MOVING") or stopped ("STOPPED").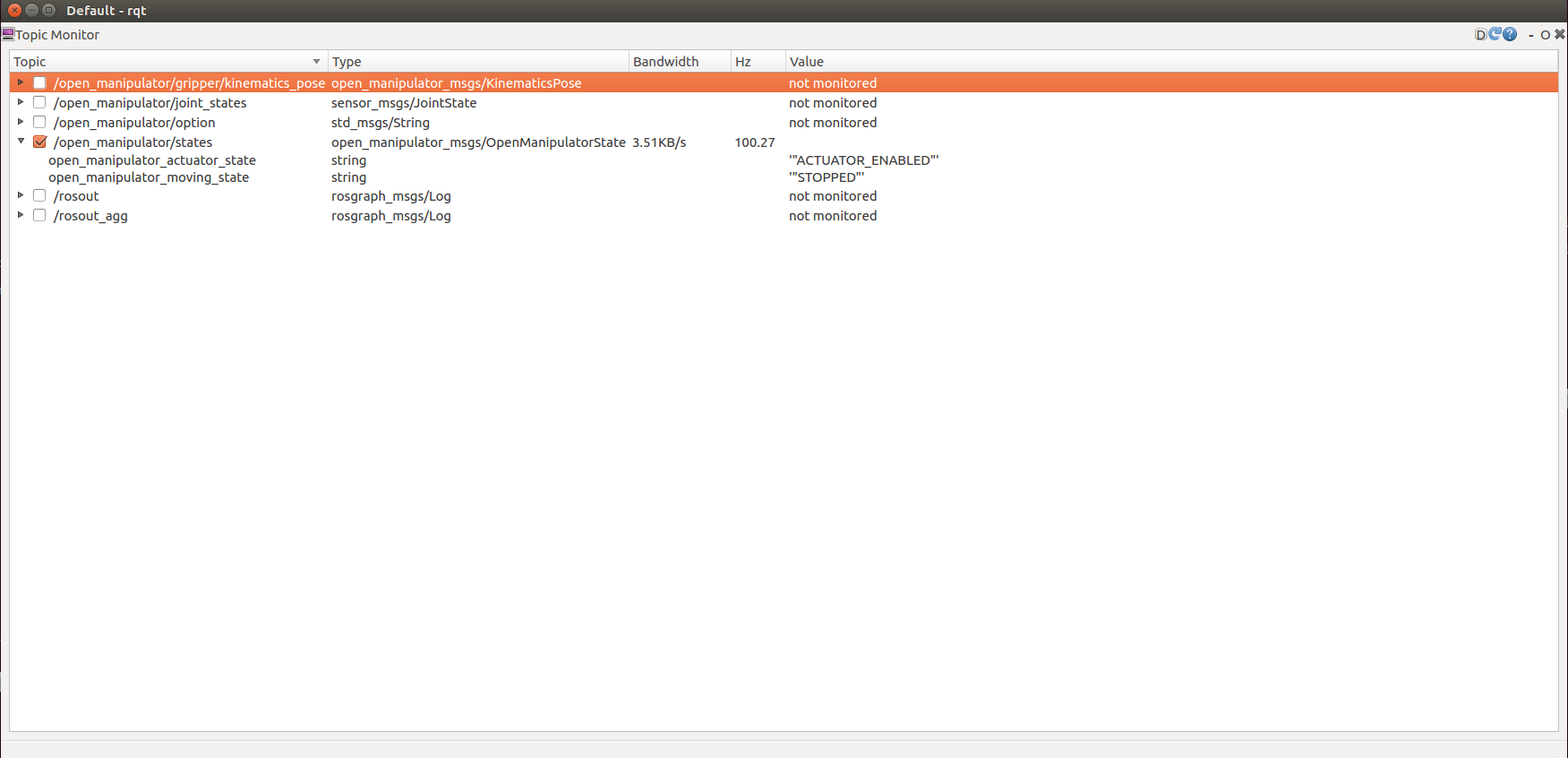
-
Subscribed Topic List
-
已订阅的topic列表: A list of topics that the open_manipulator_controller subscribes.
- /open_manipulator/option注:这些topic用于检查机械臂的状态,与其运动无关
/open_manipulator/option(std_msgs::String) is used to set OpenManipulator options.
- "print_open_manipulator_setting" : request the open_manipulator_controller controller to display "Manipulator Description".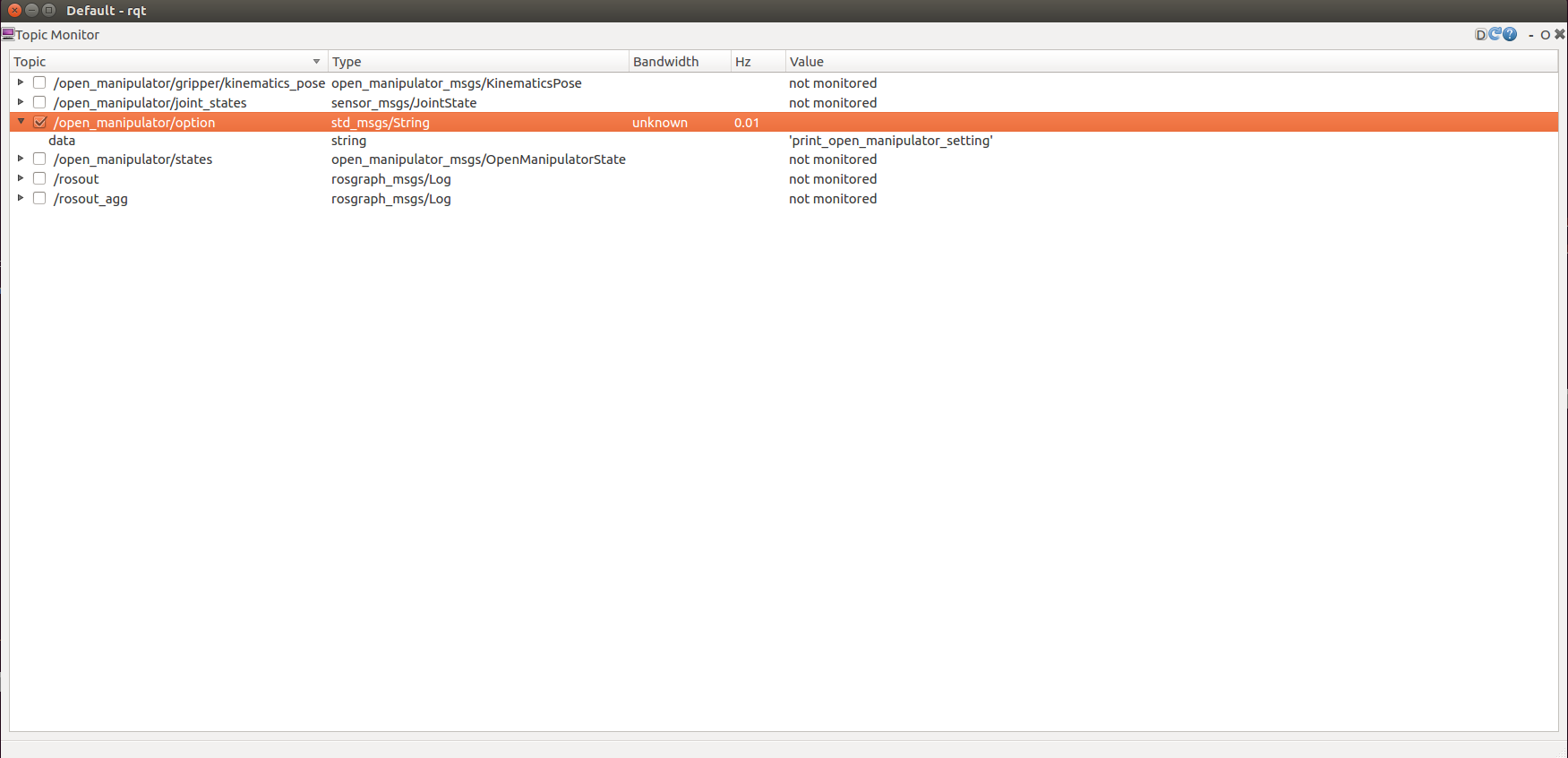
Service
- Service Server List
- /open_manipulator/goal_joint_space_path ([open_manipulator_msgs/SetJointPosition][12])The user can use this service to create a trajectory in the joint space. The user inputs the angle of the target joint and the total time of the trajectory.
- /open_manipulator/goal_task_space_path ([open_manipulator_msgs/SetKinematicsPose][14])The user can use this service to create a trajectory in the task space. The user inputs the kinematics pose of the OpenManipulator end-effector(tool) in the task space and the total time of the trajectory.
- /open_manipulator/goal_task_space_path_position_only (open_manipulator_msgs/SetKinematicsPose)The user can use this service to create a trajectory in the task space. The user inputs the kinematics pose(position only) of the OpenManipulator end-effector(tool) in the task space and the total time of the trajectory.
/open_manipulator/goal_task_space_path_orientation_only(open_manipulator_msgs/SetKinematicsPose) The user can use this service to create a trajectory in the task space. The user inputs the kinematics pose(orientation only) of the OpenManipulator end-effector(tool) in the task space and the total time of the trajectory.
- /open_manipulator/goal_joint_space_path_from_present ([open_manipulator_msgs/SetJointPosition][22])The user can use this service to create a trajectory from present joint angle in the joint space. The user inputs the angle of the target joint to be changed and the total time of the trajectory.
- /open_manipulator/goal_task_space_path_from_present ([open_manipulator_msgs/SetKinematicsPose][24])The user can use this service to create a trajectory from present kinematics pose in the task space. The user inputs the kinematics pose to be changed of the OpenManipulator end-effector(tool) in the task space and the total time of the trajectory.
- /open_manipulator/goal_task_space_path_from_present_position_only ([open_manipulator_msgs/SetKinematicsPose][26])The user can use this service to create a trajectory from present kinematics pose in the task space. The user inputs the kinematics pose(position only) of the OpenManipulator end-effector(tool) in the task space and the total time of the trajectory.
- /open_manipulator/goal_task_space_path_from_present_orientation_only ([open_manipulator_msgs/SetKinematicsPose][28])The user can use this service to create a trajectory from present kinematics pose in the task space. The user inputs the kinematics pose(orientation only) of the OpenManipulator end-effector(tool) in the task space and the total time of the trajectory.
- /open_manipulator/goal_tool_control ([open_manipulator_msgs/SetJointPosition][31])The user can use this service to move the tool of OpenManipulator.
- /open_manipulator/set_actuator_state ([open_manipulator_msgs/SetActuatorState][32])The user can use this service to control the state of actucators. If the user set true at set_actuator_state valuable, the actuator will be enabled. If the user set false at set_actuator_state valuable, the actuator will be disabled.
- /open_manipulator/goal_drawing_trajectory ([open_manipulator_msgs/SetDrawingTrajectory][33])The user can use this service to create a drawing trajectory. The user can create the circle, the rhombus, the heart, and the straight line trajectory.
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号