



















OpenManipulator机械臂入门教程-实现AR识别抓放物体
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
-
介绍在OpenManipulator机械臂运行AR识别抓放物体示例
-
测试设备: OpenManipulator机械臂 + OpenCR驱动板 + Intel D435i相机
前提准备
-
根据教程:OpenManipulator机械臂入门教程-相机应用来安装相机和AR标签的驱动包
-
准备三个贴着AR标签的立方体或其他物体
- 下图为测试时所用的物体

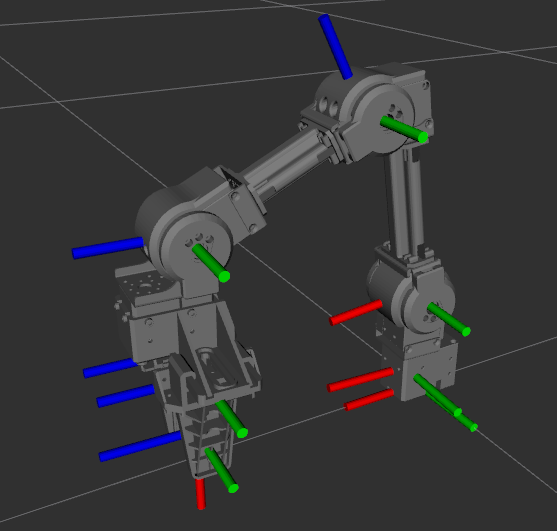
- 启动机械臂前请将机械臂手动设置以下姿势,以避免启动后出现无法控制的问题
操作步骤
- 启动OpenManipulator机械臂
$ roslaunch open_manipulator_controller open_manipulator_controller.launch usb_port:=/dev/ttyACM0- 启动相机以及AR标签识别;
camera_model为相机类型,user_marker_size为AR标签的大小
$ roslaunch open_manipulator_ar_markers ar_pose.launch camera_model:=realsense_d435 user_marker_size:=3.5- 启动抓取程序
$ roslaunch open_manipulator_pick_and_place open_manipulator_pick_and_place.launch
-----------------------------
Pick and Place demonstration!
-----------------------------
1 : Home pose
2 : Pick and Place demo. start
3 : Pick and Place demo. Stop
-----------------------------
-----------------------------
Present Joint Angle J1: 0.000 J2: 0.000 J3: 0.000 J4: 0.000
Present Tool Position: 0.000
Present Kinematics Position X: 0.000 Y: 0.000 Z: 0.000- 按数字键“1”,机械臂设置为
Home pose姿势;按数字键“2”,开始抓取例程;按数字键“3”,停止抓取例程
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=70651903&cid=122409909&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号