



















Turtlebot与Matlab入门教程-创建UI界面控制turtlebot
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何创建UI界面控制turtlebot
步骤:
在turtlebot端:
- [turtlebot] 启动Turtlebot
roslaunch turtlebot_bringup minimal.launch- [turtlebot] 启动雷达
roslaunch rplidar_ros rplidar.launch在Matlab端:
-
运行代码turtlebot_UI.m文件
-
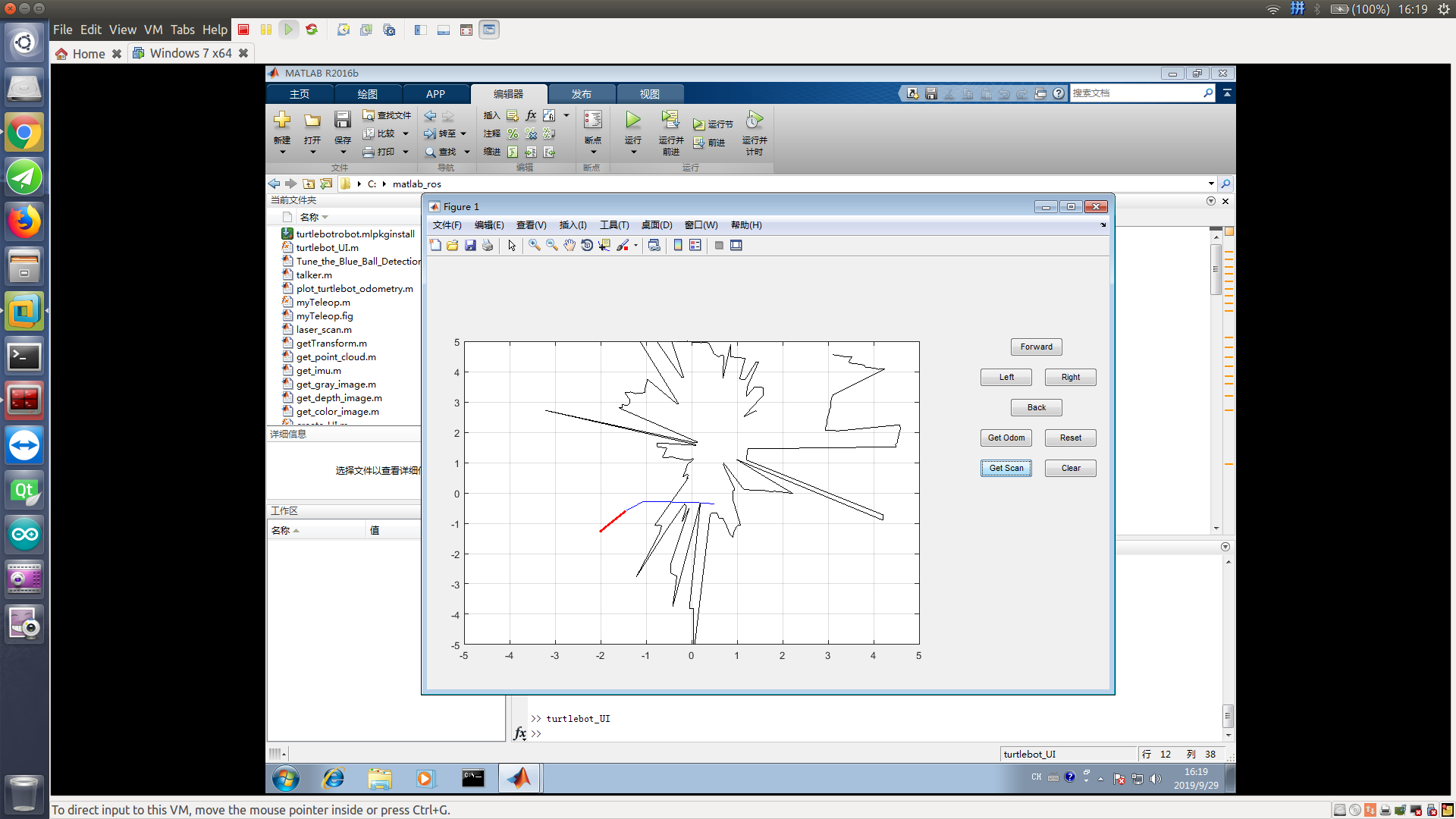
点击按键“Forward”,“back”,“Left”,“Right”,控制turtlebot前进,后退,向左,向右
-
点击按键“Get Odom”,绘制一个新的里程计(蓝色)
-
点击按键“Get Scan”,绘制当前最新的扫描数据(黑色)
-
点击按键“Reset”,重置
-
点击按键“Clear”,清楚界面的数据
-
代码如下:
%Set Up the UI and Its Components
function turtlebot_UI
f = figure('Visible','off','Position',[50,50,900,570]);
hforward = uicontrol('Style','pushbutton',...
'String','Forward','Position',[770,440,70,25],...
'Callback',@forwardCB);
hleft = uicontrol('Style','pushbutton',...
'String','Left','Position',[730,400,70,25],...
'Callback',@leftCB);
hright = uicontrol('Style','pushbutton',...
'String','Right','Position',[815,400,70,25],...
'Callback',@rightCB);
hback = uicontrol('Style','pushbutton',...
'String','Back','Position',[770,360,70,25],...
'Callback',@backCB);
hgetOdom = uicontrol('Style','pushbutton',...
'String','Get Odom','Position',[730,320,70,25],...
'Callback',@getOdomCB);
hreset = uicontrol('Style','pushbutton',...
'String','Reset','Position',[815,320,70,25],...
'Callback',@resetCB);
hgetScan = uicontrol('Style','pushbutton',...
'String','Get Scan','Position',[730,280,70,25],...
'Callback',@getScanCB);
hclear = uicontrol('Style','pushbutton',...
'String','Clear','Position',[815,280,70,25],...
'Callback',@clearCB);
ha = axes('Units','pixels','Position',[50,60,600,400]);
% Make UI visible
f.Visible = 'on';
%Connect to Robot
ipaddress = '192.168.0.93'; % IP address of your robot
tbot = turtlebot(ipaddress);
odomList = [];
scanPts = [];
resetOdometry(tbot);
%Specify Callback Functions for UI Buttons
function forwardCB(source,eventdata)
setVelocity(tbot,0.25,0)
end
function leftCB(source,eventdata)
setVelocity(tbot,0,0.5)
end
function rightCB(source,eventdata)
setVelocity(tbot,0,-0.5)
end
function backCB(source,eventdata)
setVelocity(tbot,-0.25,0)
end
function getOdomCB(source,eventdata)
plotOdom
end
function resetCB(source,eventdata)
resetOdometry(tbot);
odomList = [];
plotOdom
end
function getScanCB(source,eventdata)
plotOdom
hold on
plotScan
hold off
end
function clearCB(source,eventdata)
scanPts = [];
plotOdom
end
function plotOdom
% Gets and plots current and saved odometry
odom = getOdometry(tbot);
odomList = [odomList; odom.Position(1) odom.Position(2)];
plot(odomList(:,1),odomList(:,2),'b')
hold on
quiver(odom.Position(1),odom.Position(2),...
cos(odom.Orientation(1)),sin(odom.Orientation(1)),'r',...
'LineWidth',2)
hold off
xlim([-5,5])
ylim([-5,5])
grid on
end
function plotScan
% Plots laser scan data on top of current odometry
[scan,scanMsg] = getLaserScan(tbot);
odom = getOdometry(tbot);
cart = readCartesian(scanMsg);
scanPts = [cart(:,1)+odom.Position(1) cart(:,2)+odom.Position(2)];
yaw = odom.Orientation(1);
R = [cos(yaw) -sin(yaw); sin(yaw) cos(yaw)];
scanPts = (R*scanPts')';
plot(scanPts(:,1),scanPts(:,2),'k')
xlim([-5,5])
ylim([-5,5])
grid on
end
end效果如下:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号